
Page 269 - 《高原气象》2022年第5期
P. 269
高 原 气 象 41 卷
1362
于同一片云,空间分布差异大,二者观测云顶高度 随着 HD 增加,二者观测的平均云底高度相差逐渐
的不确定性增加,使用空间匹配原则在一定程度上 增大。HD>7 km,探空观测的平均云底高度大于云
能降低这种不确定性。因此,为提高二者观测云顶 雷达观测值。使用时间匹配原则筛选样本有效缩
高度的一致性,需同时使用时间匹配和空间匹配 小了二者平均云底高度的差值,尤其是当 HD>
原则。 7 km,二者观测平均云底高度的差值为 672 m,比
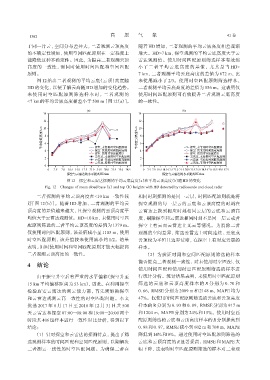
图 12 给出二者观测的平均云底(云顶)高度随 未使用减小了 2/3。使用时空匹配原则筛选样本,
HD 的变化,以便了解云高随 HD 增加的变化趋势。 二者观测平均云底高度的差值为 556 m。这表明仅
未使用时空匹配原则筛选样本时,二者观测的 使用时间匹配原则可有效提升二者观测云底高度
<7 km 的平均云底高度相差小于 500 m[图 12(a)]。 的一致性。
图12 探空和云雷达探测的平均云底高度(a)和平均云顶高度(b)随HD的变化
Fig. 12 Changes of mean cloud base(a)and top(b)heights with HD detected by radiosonde and cloud radar
二者探测的平均云顶高度在<10 km 一致性较 相同时刻探测的是同一云层,时间匹配原则就是将
好[图 12(b)]。随着 HD 增加,二者观测的平均云 探空观测的每一层云的云底和云顶高度的时刻在
顶高度的差值越来越大,且探空观测的云顶高度平 云雷达上找到相应时刻相同云层的云底和云顶高
均值大于云雷达观测值。HD>10 km,未使用时空匹 度,剔除探空和云雷达相同时刻不是同一层云或者
配原则筛选的二者平均云顶高度的差值为 1379 m。 探空上有云而云雷达上无云等情况。为消除二者
仅使用时间匹配原则,该差值减小至 1103 m,使用 观测的空间差异,筛选云雷达上时间连续、云底或
时空匹配原则,该差值较未使用减小约 1/2。结果 云顶较为平坦且边界清晰,在探空上有对应云层的
表明,同时使用时间和空间匹配原则才能大幅提高 样本。
二者观测云顶高度的一致性。 (2) 为验证时间和空间匹配原则筛选的样本
能否提高二者观测一致性,对未使用时空匹配、仅
4 结论
使用时间匹配和使用时空匹配原则筛选的样本进
由于探空升空后有严重的水平偏移(探空升至 行统计分析。统计结果表明,未使用时空匹配原则
15 km 平均偏移距离为 53 km),因此,在利用探空 筛选的云底和云顶高度样本的 R 分别为 0. 70 和
检验西安云雷达的测云能力前,首先须解决探空 0. 66,RMSE 分别为 2009 m 和 2148 m,MAPE 均为
和云雷达观测云高一致性的时空匹配问题。本文 47%。仅使用时间匹配原则筛选的云底和云顶高度
挑选 2017 年 8 月 17 日至 2018 年 12 月 31 日共 508 样本的 R 分别为 0. 93 和 0. 89,RMSE 分别为 917 m
天云雷达和探空 07:00-08:00 和 19:00-20:00 两个 和 1204 m,MAPE分别为 24% 和 15%。使用时空匹
时段共 406 组样本进行一致性对比分析,得到以下 配原则筛选的云底和云顶高度样本的 R分别提高到
结论: 0. 98和 0. 97,RMSE 减小到 602 m 和 708 m,MAPE
(1) 针对探空和云雷达的探测特点,提出了筛 降低到 14% 和 9%。通过使用时空匹配原则筛选的
选观测样本的时间匹配和空间匹配原则,以期解决 云底和云顶高度的 R 显著提高,RMSE 和 MAPE 大
二者测云一致性的时空匹配问题。为确保二者在 幅下降,这表明时空匹配原则筛选的样本对二者观