
Page 186 - 《振动工程学报》2026年第2期
P. 186
502 振 动 工 程 学 报 第 39 卷
k,i k,i k,i
4n ∑ ∂M ∂M ∂M 阻尼线圈减振效果,探讨其抑振机制。
′ g,d g,d g,d
e = − I di v x +v y +v z (9)
k
3.1 减振效果分析
i=1 ∂x ∂y ∂z
联立式 (1) 和式 (3)~(5),即可求得阻尼线圈电流
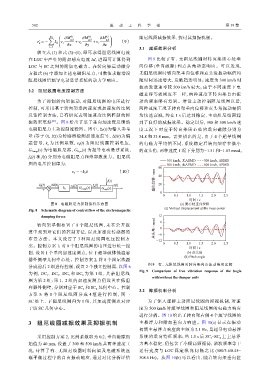
在 LGC 中产生的附加感应电流 ΔI,进而可计算得到 图 9 比较了有、无阻尼线圈时转向架质心处垂
LGC 与 SC 之间的附加电磁力。在转向架运动微分 向位移 (垂向磁隙) 和点头角动态响应。可以发现,
方程式 (6) 中添加上述电磁阻尼力,可数值求解增设 无阻尼线圈时转向架垂向位移和点头角振动幅值均
阻尼线圈后超导电动悬浮系统的动力学响应。 随时间迅速增大,发散趋势明显;速度为 300 km/h 时
振动发散速率较 500 km/h 更大;由于不同速度下电
2.2 阻尼线圈电压控制方法
磁悬浮等效刚度不一样,两种速度下转向架自由振
为了抑制转向架振动,对阻尼线圈的电压进行 动的频率略有差别。增设主动控制阻尼线圈以后,
控制,可采用基于转向架垂向速度或加速度的比例 两种速度工况下转向架垂向位移和点头角振动幅值
反馈控制方法,已有研究表明加速度比例控制的抑 均快速衰减,约在 1 s 后达到稳定,主动阻尼线圈起
振效果更好 [21] 。图 8 给出了基于垂向加速度反馈的 到了良好的减振效果。稳定以后,300 和 500 km/h 速
电磁阻尼力主动控制流程图。图中, ¨ z 0 (t)为输入参考 度工况下对应于转向架质心处的垂向磁隙分别为
量 (等于 0), ¨ z(t)为传感器检测加速度信号, ∆¨z(t)为偏 34.8 和 33.8 mm。需要指出的是,由于 4 个超导线圈
差信号,k a 为比例系数,e d (t) 为阻尼线圈控制电压, 的电磁力平均值不同,系统稳定后转向架存在微小
G Damp (s) 为电磁阻尼器,G Dyn (s) 为超导电动悬浮系统, 的点头角,两种速度工况下分别为−1.51 和−1.03 mrad。
f d (t) 和 f(t) 分别为电磁阻尼力和外部激扰力。阻尼线
300 km/h, 无AEMD 300 km/h, AEMD
圈的电压控制律为: 500 km/h, 无AEMD 500 km/h, AEMD
60
e d = −k a ¨z (10)
40
f(t) 垂向位移 / mm
z 0 (t) Δz(t) f d (t) z(t) 20
e d (t)
k a G Damp (s) G Dyn (s)
+ − 0
0 0.5 1.0 1.5 2.0 2.5
时间 / s
图 8 电磁阻尼力控制流程示意图 (a) 质心处垂向位移
(a) Vertical displacement at the mass center
Fig. 8 Schematic diagram of control flow of the electromagnetic
damping forces 12
6
转向架单侧布置了 8 个阻尼线圈,未在公开报
道中见到对它们的控制方法,以及加速度传感器的 点头角 / mrad −6 0
布置方法。本文设置了 3 种阻尼线圈电压控制方 −12
0 0.5 1.0 1.5 2.0 2.5
案。控制方案 1:对 8 个阻尼线圈的电压进行统一控
时间 / s
制,设置 1 个垂向加速度测点,位于超导磁体低温容 (b) 点头角
(b) Pitch angle
器外侧壁几何中心处。控制方案 2:将 8 个阻尼线圈
图 9 有、无阻尼线圈时转向架自由振动响应比较
分成前后 2 组进行控制,设置 2 个独立控制器,以图 6
Fig. 9 Comparison of free vibration response of the bogie
为例,DC 1 、DC 2 、DC 5 和 DC 6 为第 1 组,其余阻尼线
with/without the damper coils
圈为第 2 组;第 1、2 组的加速度测点仍设置在低温
容器外侧壁,分别对应于 SC 1 和 SC 4 几何中心。控制
3.2 抑振机制分析
方案 3: 将 8 个 阻 尼 线 圈 分 成 4 组 进 行 控 制 , 同 一
SC 处上、下阻尼线圈归为 1 组,其加速度测点对应 为了深入理解主动阻尼线圈的抑振机制,对速
于该 SC 几何中心。 度为 500 km/h 时超导线圈和阻尼线圈的电磁力响应
进行分析。图 10 给出了转向架右侧 4 个超导线圈的
3 阻 尼 线 圈 减 振 效 果 及 抑 振 机 制 主悬浮力和附加垂向力响应。图 10(a) 显示在振动
初期主悬浮力响应的主频为 2.1 Hz,是超导电动悬浮
采用控制方案 2,比例系数取为 0.2,垂向磁隙初 系统的垂向特征频率;约 1.5 s 后 SC 1 ~SC 4 上主悬浮
始值为 40 mm,设置了 300 和 500 km/h 共两种速度工 力基本稳定,仍包含了小幅高频振荡,谐波频率等于
况,计算了有、无阻尼线圈时转向架及电磁系统逐 运 行 速 度与 LGC 固 定 纵 向 间 隔 之 比 (500/3.6/0.45=
渐平衡过程中的自由振动响应,通过对比分析评估 308.6 Hz)。从图 10(b) 可以看出,随着转向架垂向位