
Page 185 - 《振动工程学报》2026年第2期
P. 185
第 2 期 陈 杰,等:磁浮列车超导电动悬浮系统的 阻尼线圈主动减振研究 501
w g
8 ∑
m¨y = l sd w s
F yj
j=1
8 ∑
m¨z = F z j −mg
左 右
j=1
侧 侧
h sd
4 ∑ 8 ∑ 4 ∑ 8 ∑
¨
I ϕ ϕ = − F yj l z j + F yj l z j + F z j l yj − F z j l yj
SC
j=1 j=5 j=1 j=5
2 ∑ 6 ∑ 4 ∑ 8 ∑
LGC DC 低温外侧壁
¨ θ = −
F z j l x j − F z j l x j + F z j l x j +
I θ F z j l x j
(a) 横截面图
j=1 j=5 j=3 j=7
(a) Cross-sectional view
2 ∑ 6 ∑ 4 ∑ 8 ∑
¨ ψ = F yj l x j + F yj l x j − F yj l x j +
I ψ F yj l x j w d
DC 3 DC 2 DC 1
j=1 j=5 j=3 j=7 DC 4
(6) DC SC 4 SC 3 SC 2 SC 1
上环 h d
式中,l xj 、l y 和 j l z 分别为第 j 个超导线圈中心与等效 D d
j
转向架质心的纵向、横向和垂向距离。基于式 (6) 编 DC
下环
制 了 单 转 向 架 动 力 学 数 值 计 算 程 序, 其 中 包 含 了 DC 8 τ d DC 7 DC 6 DC 5
1.1 节开发的三维电动磁力计算模块。 (b) 侧视图
(b) Side view
图 5 所示模型的参数参考了文献 [19],其中转向
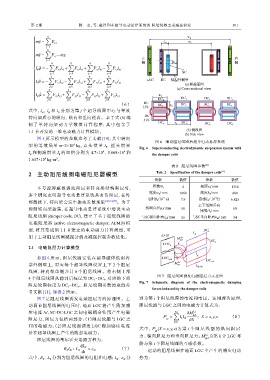
图 6 增设阻尼线圈后超导电动悬浮系统
4
架 的 等 效 质量 m=2×10 kg, 点 头 惯 量 I θ 、 摇 头 惯 量
Fig. 6 Superconducting electrodynamic suspension system with
4
4
I ψ 和侧滚惯量 I ϕ 的取值分别为 4.7×10 、5.668×10 和
the damper coils
1.647×10 kg·m 。
2
4
表 2 阻尼线圈参数 [11]
2 主 动 阻 尼 线 圈 电 磁 阻 尼 器 模 型 Tab. 2 Specification of the damper coils [11]
参数 数值 参数 数值
不考虑屏蔽板涡流阻尼和转向架结构阻尼时, 匝数N d 2 极距τ d / mm 1350
宽度w d / mm 1060 高度h d / mm 400
多个研究表明超导电动悬浮系统具有负阻尼,在外
−5
−6
电阻R d /10 Ω 7.9 自感L d / 10 H 6.825
部激扰下,转向架会发生振动发散现象 [4,6,14,20] 。为了
上下线圈垂向
抑制转向架振荡,在超导电动悬浮系统中增设主动 线圈直径φ d / mm 50 间隔D d / mm 60
阻尼线圈 (damper coils, DC),建立了基于阻尼线圈的 与SC横向距离l sd / mm 85 与SC垂向距离h sd / mm 34
电 磁 阻 尼器 (active electromagnetic damper, AEMD) 模
型,将其集成到 1.1 节建立的电动磁力计算模型,可 DC i
I di
用于主动阻尼线圈减振分析及减振控制参数优化。 I k +ΔI k,j
M g,d
SC j
LGC k
2.1 电磁阻尼力计算模型
I sj
如图 6 所示,阻尼线圈安装在超导磁体低温容 LGC n+k
k,j DC i+4
器外侧壁上,对应每个超导线圈设置上下 2 个阻尼 M g,s I d(i+4)
线圈,转向架单侧共计 8 个阻尼线圈。将右侧上部
图 7 阻尼线圈诱发电磁阻尼力示意图
4 个阻尼线圈从前到后标记为 DC 1 ~DC 4 ,对应的下部
Fig. 7 Schematic diagram of the electromagnetic damping
阻尼线圈标记为 DC 5 ~DC 8 。阻尼线圈参数的取值参
forces induced by the damper coils
考文献 [11],如表 2 所示。
图 7 是阻尼线圈诱发电磁阻尼力的原理图。主 别为第 i 个阻尼线圈的电流和电压。运用虚功原理,
动调节阻尼线圈的电压时,地面 LGC 将产生附加感 阻尼线圈与 LGC 之间的电磁力计算式为:
应电流 ΔI,SC-DC-LGC 之间电磁耦合作用产生电磁 4n ∑ ∂M k,i
i
F = g,d ;X = x,y,z (8)
阻尼力,阻尼力包括两部分:(1)阻尼线圈与 LGC 之 dX I k I di ∂X
k=1
间的电磁力;(2)阻尼线圈诱发 LGC 附加感应电流
式 中, F (X = x,y,z)为 第 i 个 阻 尼 线 圈 的 纵 向 阻 尼
i
后在超导线圈上产生的附加电磁力。 dX
力、横向阻尼力和垂向阻尼力; M 为第 k 个 LGC 环
k,i
阻尼线圈的基尔霍夫电路方程为: g,d
路与第 i 个阻尼线圈的互感系数。
dI di
R d I di + L d = e di (7) 运动的阻尼线圈在地面 LGC 中产生的感应电动
dt
式中,R d 、L d 分别为阻尼线圈的电阻和电感;I di 、e d 分 势为:
i