
Page 184 - 《振动工程学报》2026年第2期
P. 184
500 振 动 工 程 学 报 第 39 卷
表 1 超导线圈和悬浮导向线圈参数 [4] 实测 计算
5
Tab. 1 Specification of the superconducting coils and levitation/ 0 300 km/h
guidance coils [4] −5
垂向力 / kN −10
结构部件 参数 数值 −15
长度l s / mm 1070 −20 150 km/h
高度h s / mm 500 0
车载超导线圈(SC) −5
极距τ s / mm 1350 垂向力 / kN −10
磁动势I s / kA 700 −15
长度l g / mm 350 −20
−0.10 −0.05 0 0.05 0.10
高度h g / mm 340 时间 / s
地面悬浮导向线圈(LGC) 极距τ g / mm 450
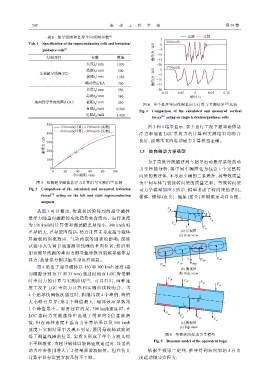
图 4 单个悬浮导向线圈垂向力计算与实测结果 [23] 比较
自感L g / mH 0.288
Fig. 4 Comparison of the calculated and measured vertical
电阻R g / mΩ 8.928
[23]
forces acting on single levitation/guidance coils
500
150 km/h(计算) 150 km/h (实测) 图 3 和 4 结果显示,多个运行工况下超导磁体悬
300 km/h(计算) 300 km/h (实测)
400 浮力和地面 LGC 垂向力的计算和实测结果均吻合
悬浮力 / kN 300 良好,说明本文的电动磁力计算模型正确。
1.3 转向架动力学模型
200
100
为了高效开展磁浮列车超导电动悬浮系统的动
0 力学性能分析,将中间车辆简化为包含 1 个完整转
0 20 40 60 80 100
垂向磁隙 / mm 向架的悬浮体,不考虑车辆的二系悬挂,其等效质量
图 3 双侧超导磁体悬浮力计算值与实测值 [23] 比较 为中间车体与铰接转向架的质量之和。等效转向架
Fig. 3 Comparison of the calculated and measured levitation 动力学模型如图 5 所示,模型考虑了转向架的浮沉、
[23]
forces acting on the left and right superconducting 横移、俯仰 (点头)、偏航 (摇头) 和侧滚运动自由度。
magnets
从图 3 可以看出,仿真和试验得到的超导磁体 F yj o y
l zj
悬浮力随垂向磁隙的变化趋势吻合度高。运行速度 l yj ϕ
F yj
为 150 km/h时计算值和测试值差异很小,300 km/h 时 F zj z
F zj
差异稍大,差异原因包括:仿真计算未考虑超导磁体 (a) 后视图
(a) Rear view
屏蔽板的涡流效应、气动荷载等因素的影响;现场
试验中人为调节地面测量线圈的垂向位置,然后利 o θ
x
用该测量线圈的垂向力测量值转换得到超导磁体悬
浮力,故悬浮力测试值本身也有误差。 z F z2/6 F z1/5
F z3/7 mg
图 4 给出了超导磁体以 150 和 300 km/h 速度 (垂 F z4/8
(b) 侧视图
向磁隙分别为 37 和 33 mm) 通过时地面 LGC 所受瞬 (b) Side view
时垂向力的计算与实测曲线 [23] 。可以看出,两种速 F y8 F y7
F y6
F y5
度工况下 LGC 垂向力计算和实测曲线较吻合。当
4 个超导线圈依次通过时,相继出现 4 个峰值,峰值 o x
大小略有差异;第 2 个峰值最大,端部效应导致第 ψ
l xj
1 个峰值最小。需要注意的是,300 km/h速度时,在
y
LGC 垂向力实测曲线中出现了明显的 2 倍基频谐 F y4 F y3
F y2
F y1
波,但在两种速度下垂向力计算结果以及 150 km/h (c) 俯视图
(c) Top view
速度下实测结果中表现不明显,原因是现场试验调
图 5 等效转向架动力学模型
低了测量线圈的位置,实质上形成了单个方波几何
Fig. 5 Dynamic model of the equivalent bogie
不平顺激扰,当超导磁体以较高速度通过时,显著的
动力冲击作用增大了 2 倍基频谐波幅值。但在仿真 依据牛顿第二定律,推导得到转向架的 5 自由
计算中没有设置方波几何不平顺。 度运动微分方程为: