
Page 121 - 《振动工程学报》2026年第2期
P. 121
第 2 期 李国芳,等:路基不均匀沉降引起的轨道损伤变形及其对车轨动力响应的影响分析 437
虚拟椭圆 向坐标; g(y)为最大渗透量与轮轨型面间隙函数的
差;A 表示接触点几何位置参数; p 0 为最大接触压
力; a 0 为 y=0 时接触斑的纵向宽度。
滚动方向 条带 1.2 路基不均匀沉降模型
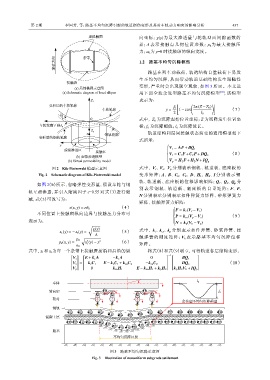
路基在列车动载荷、轨道结构自重载荷下易发
生不均匀沉降,从而带动轨道基础结构发生跟随性
接触斑
(a) 局部椭圆示意图 变形,严重时会出现脱空现象,如图 3 所示。本文选
(a) Schematic diagram of local ellipse 用下凹全波余弦型路基不均匀沉降模型 [18] ,该模型
表示为:
Z 1
变形后的车轮轮廓 [ ( 2π(Z −Z 0 ) )]
车轮轮廓 y = f 0 1−cos (7)
2 l 0
δ 0
O 式中, Z 0 为沉降起始位置坐标;Z 为沉降发生位置坐
标;f 0 为沉降幅值;l 0 为沉降波长。
车轮轮廓下移δ 0
Z 2
x 钢轨轮廓 轨道结构和层间接触状态演变的通用模型如下
变形后的钢轨轮廓
o 式所示:
y
V r = AF+ BQ r
虚拟渗透区
接触区 (8)
V s = C 1 F+C 2 P+ DQ s
(b) 虚拟渗透模型
(b) Virtual permeability model V p = H 1 F+ H 2 N + IQ p
图 2 Kik-Piotrowski 模型示意图 式中, V r 、V s 、V p 分别表示钢轨、轨道板、底座板的
Fig. 2 Schematic diagram of Kik-Piotrowski model 变 形 矩 阵; A、 B、 C 1 、 C 2 、 D、 H 1 、 H 2 、 I 分 别 表 示 钢
轨、轨道板、底座板的位移影响矩阵;Q r 、Q s 、Q p 分
如图 2(b)所示,忽略弹性变形量,假设车轮与钢
别 表 示 钢 轨、 轨 道 板 、 底 座 板 的 自 重 矩 阵 ; F、 P、
轨互相渗透,并引入缩减因子 ε=0.55 对式(3)进行缩
N 分别表示分别表示扣件弹簧力矩阵、砂浆弹簧力
减,式(3)可改写为:
矩阵、接触弹簧力矩阵:
(4)
z(x,y) = εδ 0
F = k c (V s −V r )
不同位置上接触斑纵向边界与接触压力分布可
P = k ca (V p −V s ) (9)
表示为: N = k p (V b −V p )
√
g(y) 式中, k c 、k ca 、k p 分别表示扣件弹簧、砂浆弹簧、接
x 1 (y) = −x t (y) = (5)
A
√ 触 弹 簧 的 刚 度 矩 阵; V b 表 示 路 基 不 均 匀 沉 降 位 移
p 0 2
p z (x,y) = x (y)− x 2 (6)
1 矩阵。
a 0
式中, x 1 和 为每一个条带上接触斑前沿和后沿的纵 将式(8)和式(9)联立,可得轨道各层结构变形:
x t
−1
E+ k c A −k c A 0
V r BQ r
(10)
V s = k c C 1 E− k c C 1 + k ca C 2 −k ca C 2 DQ s
V p 0 k ca H 1 E− k ca H 1 + k p H 2 k p H 2 V b + IQ p
车体 l 0
转向架 f 0
轮对
余弦型不均匀沉降模型
钢轨
混凝土层
路基
不均匀沉降区段
图 3 路基不均匀沉降示意图
Fig. 3 Illustration of nonuniform subgrade settlement