
Page 120 - 《振动工程学报》2026年第2期
P. 120
436 振 动 工 程 学 报 第 39 卷
普通钢筋&预应力钢筋 用 S1002CN,具体模型包括车体、2 个构架、4 个轮
轨道板 钢轨 宽窄缝
对、8 个轴箱,同时考虑一系减振器、抗蛇行减振器、
横向止挡、二系减振器等非线性因素,整车共 50 个
水泥乳化 自由度。运用有限元-多体动力学(FE-MBD)方法可
底座板 沥青砂浆
在保证计算精度的前提下大幅提高计算效率 [15-17] 。
本文基于 FE-MBD 方法建立车辆子系统、CRTSⅡ 型
板 式 无 砟 轨 道 子 系 统 和 路 基 子 系 统, 考 虑 列 车 -
轨道-路基相互作用关系,建立了高速铁路车辆-轨
内聚力 道-路基耦合系统动力学模型。轨道子系统中,轨道
模型 面面
扣件 接触 结构及基础结构子系统为柔性子系统,即在有限元
软件中分别建立轨道板、底座板、路基等有限元模
型,对其进行模态缩减,通过正则化剔除刚体模态生
成柔性子系统,为保证路基底部结构不因车辆荷载
影响而发生较大的位移和变形,通过 Bushing 力元将
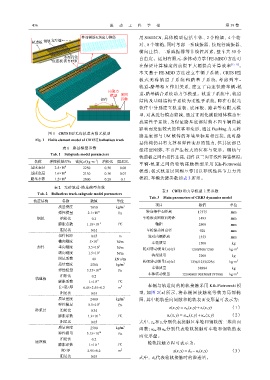
图 1 CRTSⅡ 型无砟轨道有限元模型
路基底部与 UM 软件的环境坐标系相连接,此时路
Fig. 1 Finite element model of CRTSⅡ ballastless track
基结构仍具有支撑和弹性变形的能力,但其底部已
表 1 路基模型参数
经接近刚体,不再产生较大的位移与变形。钢轨与
Tab. 1 Subgrade model parameters
轨道板之间由扣件连接,扣件以三向非线性弹簧模拟;
名称 弹性模量E/Pa 密度ρ/(kg·m ) 泊松比 阻尼比
−3
车辆-轨道之间的轮轨接触模型采用 Kik-Piotrowski
基床表层 2.5×10 8 2250 0.30 0.08
基床底层 1.6×10 8 2130 0.30 0.07 模型;板式轨道层间相互作用以非线性共节点力元
路基本体 1.2×10 8 2000 0.28 0.1 模拟,车辆关键参数如表 3 所示。
表 2 无砟轨道-路基模型参数
表 3 CRH3 动力学模型主要参数
Tab. 2 Ballastless track-subgrade model parameters
Tab. 3 Main parameters of CRH3 dynamics model
轨道结构 名称 数值 单位
项目 数值 单位
质量密度 7850 kg/m 3
弹性模量 2.1×10 11 Pa 转向架中心距离 17375 mm
钢轨 泊松比 0.3 车轮滚动圆横向跨距 1493 mm
膨胀系数 1.18×10 −5 /℃ 轴距 2500 mm
阻尼比 0.01 车轮滚动圆直径 920 mm
扣件间距 0.65 m 轮对内侧距离 1353 mm
横向刚度 5×10 7 N/m 车轮质量 1500 kg
扣件 垂向刚度 3.5×10 7 N/m 轮对转动惯量(x/y/z) 1200/300/1200 kg·m 2
纵向刚度 1.5×10 7 N/m 构架质量 2200 kg
阻尼系数 48 kN·s/m 构架转动惯量(x/y/z) 2
质量密度 2500 kg/m 3 1236/1233/2236 kg·m
车体质量 38884 kg
弹性模量 3.55×10 10 Pa
车体转动惯量 1259000/1905300/1797900 kg·m 2
泊松比 0.2
轨道板
膨胀系数 1×10 −5 /℃
车辆与轨道间的轮轨接触采用 Kik-Piotrowski 模
长×宽×厚 6.45×2.55×0.2 m 3
阻尼比 0.03 型,如图 2(a)所示,将非椭圆接触斑等效为局部椭
质量密度 2400 kg/m 3 圆,其中轮轨垂向间隙和轮轨表面变形量可表示为:
弹性模量 8.5×10 9 Pa
z(x,y) = z w (x,y)+z r (x,y) (1)
砂浆层 泊松比 0.34
膨胀系数 1.3×10 −5 /℃ u z (x,y) = u zw (x,y)+u zr (x,y) (2)
阻尼比 0.05 式中, z w 和 分别代表接触区车轮和钢轨的三维曲面
z r
质量密度 2500 kg/m 3 函数; u zw 和 u zr 分别代表轮轨接触时车轮和钢轨的表
弹性模量 3.15×10 10 Pa 面变形量。
泊松比 0.2
底座板 轮轨接触方程可表示为:
膨胀系数 1×10 −5 /℃
宽×厚 2.95×0.2 m 2 z(x,y) = δ 0 −u z (x,y) (3)
阻尼比 0.03 式中, δ 0 代表轮轨接触时的渗透量。