
Page 33 - 《振动工程学报》2025年第11期
P. 33
第 11 期 刘昌宁,等:车辆惯容悬架等效阻抗特性分析及频域调控实现 2491
R L 为电学网络的负载阻抗,T 2 (s) 为结构 S2 的机械阻 惯质系数减小。该装置结构设计简易、方便安装,
抗),可以有效抑制弹簧元件的振动功率反射效应。 且可以实现介质差异条件下的传动连接。选用英国
采用速度型阻抗传递函数进行分析,惯容悬架的内 Instron 8800 液压伺服激振系统对装置力学性能开展
阻抗 R 0 如下: 试验测试,惯容器性能测试现场如图 10 所示。
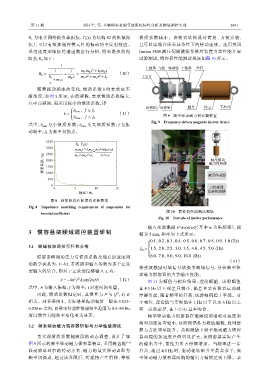
1 上轴承 飞轮 驱动轮 下轴承 丝杆
3
1 1 m 1 m 2 s +k t m 2 s
R 0 = + = 2 2 (10)
k t m 2 s m 1 s +m 2 s +k t 上吊耳
+m 1 s
s
随着振动频率的变化,惯质系数 b 的要求也不
断改变,如图 8 所示,在低频段,要求惯质系数偏大,
在中高频段,需采用较小的惯质系数,即
从动轴 从动轮 螺母 外壳 下吊耳
b min , f ⩽ f 0
b = (11)
图 9 频率驱动磁力惯容器装置
b max , f > f 0
Fig. 9 Frequency-driven magnetic inerter device
式中,b mi 为小惯质系数;b ma 为大惯质系数;f 为振
x
n
动频率;f 0 为频率切换点。
3500
R 0 =T 2 (s)
3000 m 1 m 2 s +k t m 2 s bcs +bks+ck
3
2
= bs +cs
2500
惯质系数 / kg 2000 磁力惯容器
2
2
2
m 1 s +m 2 s +k t
频率驱动
1500
1000
液压作动器
500
0
0 5 10 15 力传感器
位移传感器
频率 / Hz
图 8 悬架阻抗匹配惯质系数要求
Fig. 8 Impedance matching requirement of suspension for
图 10 惯容器性能测试现场
inertial coefficient
Fig. 10 Test site of inerter performance
输入弦波激励 x=Acos(ωt)(其中 ω 为角频率),振
3 惯 容 悬 架 频 域 调 控 装 置 研 制 幅为 5 mm,频率如下式所示:
0.1,0.2,0.3,0.4,0.5,0.6,0.7,0.8,0.9,1.0 (Hz)
3.1 频域被动调控可行性分析
f Hz =1.5,2.0,2.5,3.0,3.5,4.0,4.5,5.0 (Hz)
惯容器两端的受力与惯质系数及端点加速度间 6.0,7.0,8.0,9.0,10.0 (Hz)
(13)
的数学关系为:F=b ¨ x,若将路面输入等效为多个正弦
将弦波激励时域信号转换为频域信号,分析频率驱
型输入的集合,则对于正弦型位移输入 x,有:
动磁力惯容器的力学输出性能。
2
2
¨ x = −4π f Asin(2πft) (12) 图 11 为幅值与相位结果,理论幅值、试验幅值
式中,A 为输入振幅;f 为频率;t 对应时间变量。 在 4.5 Hz 以下时差异较小,偏差主要由装置运动副
2
因此,惯质系数恒定时,其惯性力 F 与 (f , A) 正 摩擦引起,随着频率的升高,试验幅值趋于平缓。对
相关。对于乘用车,实际悬架振动幅值一般在 0.023~ 于相位,理论值与实际值在 1 Hz 以下以及 6 Hz 以上
0.030 m 之间,而乘坐舒适性敏感频率范围为 0.5~80 Hz, 有一定的差异,在 1~5 Hz 基本吻合。
所以惯性力随频率变化更为显著。 频率驱动磁力惯容器在低频段两端相对速度和
相对加速度均较小,该阶段惯性力数值偏低,此时摩
3.2 频率驱动磁力惯容器研制与力学性能测试
擦力占比明显提升。高频激励下频率驱动磁力惯容
为实现惯质系数随频段的动态调整,设计了如 器两端的加速度差值明显扩大,该惯容器实际产生
图 9 所示的频率驱动磁力惯容器装置,采用磁齿轮 [16] 的输出力中,惯性力所占份额增加。当频率进一步
联动滚珠丝杠的传动方案,磁力的最大驱动点即为 升高,超过 4.5 Hz 时,驱动轮转矩升至最高水平,频
频率切换点,超过该界限后,传递将产生滑移,等效 率驱动磁力惯容器两端的输出力幅值达到上限。基