
Page 105 - 《振动工程学报》2025年第11期
P. 105
第 11 期 张宇腾,等:面向不同标签与域配置的统一跨域故障诊断方法 2563
不同域配置跨域故障诊断场景下,模型参数更 3.1 数据集描述
新过程可以描述为:
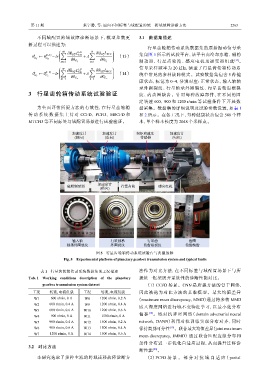
行星齿轮箱传动系统数据集的原始振动信号采
M LS
∑ ∂E D s mL N ∑ ∂E D t nL PCC 集自图 所示的试验平台,该平台由冷却水箱、磁粉
θ t ← θ (t−1) −lr CE +λ (13) 5
G f G f
m=1 ∂θ G f n=1 ∂θ G f 制动器、行星齿轮箱、感应电机及逆变器组成 [17] 。
M LS 信号采样频率为 20 kHz,涵盖了行星齿轮箱传动系
∑ ∂E D s mL N ∑ ∂E D t nL PCC
t
θ ← θ (t−1) −lr CE +λ (14) 统中常见的多种故障模式。试验数据集包含 种健
G c G c 5
∂θ G c ∂θ G c
m=1 n=1
康状态,标记为 0~4,分别对应:正常状态、输入轴轴
承外圈裂纹、行星轴承外圈裂纹、行星齿轮齿根裂
3 行 星 齿 轮 箱 传 动 系 统 试 验 验 证 纹、内齿圈缺齿。针对每种故障部件,在不同的固
定转速 600、900 和 1200 r/min 等试验条件下开展数
为全面评估所提方法的有效性,在行星齿轮箱 据采集。数据集的详细说明及试验参数设置,如表 1
传 动 系 统 数 据 集 上 针对 CCFD、 PCFD、 MSCFD 和 和 2 所示。在各工况下,每种健康状态包含 588 个样
MTCFD 等不同标签与域配置场景进行试验验证。 本,单个样本长度为 2048 个采样点。
加速度计 加速度计 扭矩和速度 加速度计
(轴向) (垂向) 传感器 (电机)
加速度计
磁粉制动器 行星齿轮 感应电机
(横向)
输入轴 行星轴承 行星齿 齿圈
轴承外圈裂纹 外圈裂纹 轮齿根裂纹 轮齿缺齿
图 5 行星齿轮箱传动系统试验台与典型故障
Fig. 5 Experimental platform of planetary gearbox transmission system and typical faults
表 1 行星齿轮箱传动系统数据集的工况描述 法作为对比方法,在不同标签与域配置场景下与所
Tab. 1 Working conditions description of the planetary 提统一框架展开系统性的诊断性能对比。
gearbox transmission system dataset (1) CCFD 场景。CNN 是所提方法的骨干网络,
工况 转速,电流负载 工况 转速,电流负载 因此被选为对比方法的基准模型。最大均值差异
W1 600 r/min,0 A W8 1200 r/min,0.2 A (maximum mean discrepancy,MMD)通过将多核 MMD
W2 600 r/min,0.4 A W9 1200 r/min,0.4 A
嵌入深度网络进行域不变特征学习,以最小化分布
W3 600 r/min,0.6 A W10 1200 r/min,0.6 A
偏 移 [18] 。 域 对 抗 神 经 网 络 ( domain adversarial neural
W4 900 r/min,0 A W11 1500 r/min,0 A
W5 900 r/min,0.4 A W12 1500 r/min,0.2 A network,DANN)利用对抗训练实现分布对齐,同时
W6 900 r/min,0.6 A W13 1500 r/min,0.4 A 保持类别可分性 [19] 。联合最大均值差异(joint maximum
W7 1200 r/min,0 A W14 1500 r/min,0.6 A
mean discrepancy,JMMD) 通过联合匹配边缘分布和
条件分布进一步优化自适应过程,从而提升迁移诊
3.2 对比方法
断性能 [20] 。
本研究选取了多种主流的跨域迁移故障诊断方 (2) PCFD 场 景 。 部 分 对 抗 域 自 适 应 ( partial