
Page 38 - 卫星导航2021年第1-2合期
P. 38
Du et al. Satell Navig (2021) 2:3 Page 5 of 22
Table 2 Mathematical models of faults (Bhatti and Ochieng 2007)
Error type Failure model Remarks
Step error/Bias f (t) = Au(t − t 0 ) Where, f (t) is the value of the fault at time t ; u(t) is the unit step function and t 0 is the onset time of
2
the failure; A is the amplitude of the fault; R is the slop of the fault; G ∼ N µ, σ represents Gauss‑
Ramp error f (t) = R(t − t 0 )u(t − t 0 )
2
ian distribution with mean µ and variance σ ; θ is the phase diference.
Random noise f (t) = Gu(t − t 0 )
Oscillation f (t) = A sin (t − θ)u(t − t 0 )
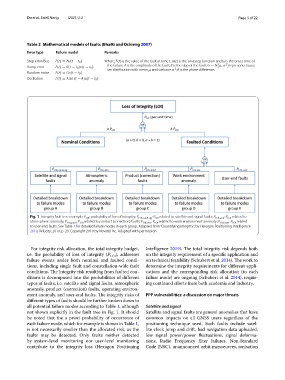
Fig. 1 Integrity fault tree example; P : probability of loss of integrity; P LOI, sat & sig : P related to satellite and signal faults; P LOI, atm : P related to
LOI
LOI
LOI
atmospheric anomaly; P LOI, prod : P related to product (correction) faults; P LOI, env : P related to work environment anomaly; P LOI, user : P related
LOI
LOI
LOI
to user‑end faults. See Table 1 for detailed failure modes in each group. Adapted from “Quantifying Integrity”, by Hexagon Positioning Intelligence
2019, Velocity, 2019, p. 20. Copyright 2019 by Novatel Inc. Adapted with permission
For integrity risk allocation, the total integrity budget, Intelligence 2019). Te total integrity risk depends both
i.e. the probability of loss of integrity (P LOI ), addresses on the integrity requirement of a specifc application and
failure events under both nominal and faulted condi- on technical feasibility (Schubert et al. 2014). Te work to
tions, including single fault and constellation-wide fault determine the integrity requirements for diferent appli-
conditions. Te integrity risk resulting from faulted con- cations and the corresponding risk allocation (to each
ditions is decomposed into the probabilities of diferent failure mode) are ongoing (Schubert et al. 2014), requir-
types of faults, i.e. satellite and signal faults, atmospheric ing continued eforts from both academia and industry.
anomaly, product (correction) faults, operating environ-
ment anomaly, and user-end faults. Te integrity risks of PPP vulnerabilities: a discussion on major threats
diferent types of faults should be further broken down to
all potential failure modes according to Table 1, although Satellite and signal
not shown explicitly in the fault tree in Fig. 1. It should Satellite and signal faults are general anomalies that have
be noted that the a priori probability of occurrence of common impacts on all GNSS users regardless of the
each failure mode, which for example is shown in Table 1, positioning technique used. Such faults include satel-
is not necessarily smaller than the allocated risk, as the lite clock jump and drift, bad navigation data uploaded,
faults may be detected. Only faults neither detected low signal power/power fuctuations, signal deforma-
by system-level monitoring nor user-level monitoring tions, Radio Frequency flter failures, Non-Standard
contribute to the integrity loss (Hexagon Positioning Code (NSC), unannounced orbit manoeuvres, ionisation