
Page 158 - 卫星导航2021年第1-2合期
P. 158
Wang et al. Satell Navig (2021) 2:9 Page 8 of 11
Compared with individual FCBs on each frequency, the
stability is signifcantly better for the combined FCBs, 10 5 East
especially for the WL combination. For the WL combina- 0
tion, the STD is 0.015, 0.005, 0.011 cycles for respective −5
GPS, Galileo, and BDS-2. Te corresponding STD for the −10 PPP float PPP AR
NL combination is 0.039, 0.049, 0.139 cycles, which is 10 5 North
larger than that for the WL combination. For individual Static PPP RMS (cm) 0
FCB on each frequency, its fuctuation is remarkable with −5
larger STDs. Hence, the more precise and stable FCB −10
measurements from PPP processing are reasonable and 10 Up
more suitable for the FCB estimation. 5 0
For the BDS-2 shown in Fig. 8, the stability of the FCBs −5
is much poorer than other systems except for the WL −10
combinations. At present, the precision of BDS-2 satel- 0 1 Time (h) 2 3
lite ephemeris is not as good as GPS or Galileo. Conse- Fig. 10 Static PPP positioning errors for station YARR with 3-h data
quently, the accuracy of the foat ambiguities in BDS-2
PPP is degraded and the RMS of residuals in BDS-2 FCB
estimation is larger than other GNSS systems as shown in
Fig. 5. Hence, the mean of STDs for the BDS-2 narrow- Note that the reference coordinates for each station are
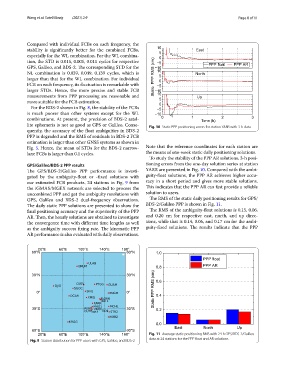
lane FCBs is larger than 0.1 cycles. the means of one-week static daily positioning solutions.
To study the stability of the PPP AR solutions, 3-h posi-
GPS/Galileo/BDS‑2 PPP results tioning errors from the one-day solution series at station
Te GPS/BDS-2/Galileo PPP performance is investi- YARR are presented in Fig. 10. Compared with the ambi-
gated by the ambiguity-foat or -fxed solutions with guity-foat solutions, the PPP AR achieves higher accu-
our estimated FCB products. 24 stations in Fig. 9 from racy in a short period and gives more stable solutions.
the iGMAS/MGEX network are selected to process the Tis indicates that the PPP AR can fast provide a reliable
uncombined PPP and get the ambiguity resolutions with solution to users.
GPS, Galileo and BDS-2 dual-frequency observations. Te RMS of the static daily positioning results for GPS/
Te daily static PPP solutions are presented to show the BDS-2/Galileo PPP is shown in Fig. 11.
fnal positioning accuracy and the superiority of the PPP Te RMS of the ambiguity-foat solutions is 0.15, 0.06,
AR. Ten, the hourly solutions are obtained to investigate and 0.20 cm for respective east, north, and up direc-
the convergence time with diferent time lengths as well tions, while that is 0.14, 0.06, and 0.17 cm for the ambi-
as the ambiguity success fxing rate. Te kinematic PPP guity-fxed solutions. Te results indicate that the PPP
AR performance is also evaluated with daily observations.
20°E 60°E 100°E 140°E 180°
60°N 60°N 1.0
PPP float
0.8 PPP AR
Static PPP RMS (cm)
30°N 30°N 0.6
0° 0° 0.4
30°S 30°S 0.2
0.0
60°S 60°S East North Up
20°E 60°E 100°E 140°E 180° Fig. 11 Average static positioning RMS with 24-h GPS/BDS-2/Galileo
data at 24 stations for the PPP foat and AR solutions
Fig. 9 Station distribution for PPP users with GPS, Galileo, and BDS-2