
Page 155 - 卫星导航2021年第1-2合期
P. 155
Wang et al. Satell Navig (2021) 2:9 Page 5 of 11
estimate the precise real-value ambiguities on each fre-
B 1
quency of observed satellites. In this study, the FCBs are
.
.
. estimated with an interval of 15 min. Hence, in the qual-
B r
1 ity checking of the foat ambiguity solutions, the ambigu-
n 1 R 1 S 1
. . . ities estimated with the observations of less than 10 min
.
. .
. .
. . . . are deleted. After the quality checking, the ambiguities
B m
n R r S (12)
s = s are inputted into the FCB estimator. Ten, the individ-
B 1
.
r .
. . ual ambiguities on each frequency are combined using
.
. . . . .
.
.
n n m R m S n Eq. (9). Te FCBs measurements in Eq. (11) are adopted
B
in the FCBs estimation for the WL and NL combinations.
s
. Finally, the inverse operation in Eq. (10) is conducted to
.
.
B n recover the individual FCBs on each frequency. Te raw
FCB on each frequency is fexible in the State Space Rep-
In the coefcient vector R , the rth element is 1 and the resentation (SSR) of Radio Technical Commission for
r
s
others are zero. In the coefcient vector S , the sth ele- Maritime service (RTCM) for users’ PPP AR (Shi 2012).
ment is –1 and the others are zero. One satellite for each
GNSS system and new combined WL or NL ambiguities, PPP AR at the user terminal
respectively, is selected as a datum whose FCB is fxed to After correcting the satellite FCBs for the estimation of
zero for resolving the rank defciency in Eq. (12). foat ambiguities, the SD PPP ambiguities are proposed in
For the multi-GNSS data, the FCBs of new WL and the ambiguity resolution for removing the receiver FCB.
NL combinations can be estimated together with GPS/ Additionally, the combined ambiguities, as shown in
BDS-2/Galileo. To reduce the high computation load, Eq. (9), are recommended for the FCB estimation. Hence,
the FCBs of the WL and NL combinations are estimated the WL and NL combinations of ambiguities are sequen-
system by system. Te individual FCBs are recovered by tially fxed. To eliminate the efects of measurement noise
the inverse operation in Eq. (10). Te multi-GNSS FCBs and multipath, the satellite elevation angle adopted in
are integrated in one fle by the predefned formats. Te the ambiguity resolution should not be less than 15°. Te
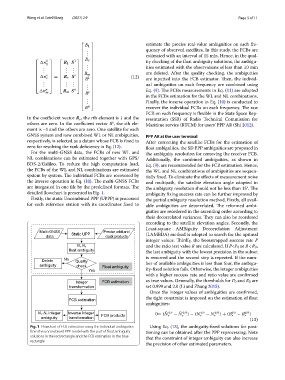
detailed fowchart is presented in Fig. 1. ambiguity fxing success rate can be further improved by
Firstly, the static Uncombined PPP (UPPP) is processed the partial ambiguity resolution method. Firstly, all avail-
for each reference station with its coordinates fxed to able ambiguities are decorrelated. Te reformed ambi-
guities are reordered in the ascending order according to
their decorrelated variances. Tey can also be reordered
according to the satellite elevation angles. Secondly, the
Least-square AMBiguity Decorrelation Adjustment
Multi-GNSS Static UPP Precise orbit and
data clock products (LAMBDA) method is adopted to search for the optimal
integer values. Tirdly, the bootstrapped success rate P
N 1′ N 2 and the ratio test value R are calculated. If P<P 0 or R < R 0 ,
float ambiguity the last ambiguity with the lowest precision in the subset
Delete No Quality is removed and the second step is repeated. If the num-
ambiguity check Float ambiguity ber of available ambiguities is less than four, the ambigu-
Yes ity-fxed solution fails. Otherwise, the integer ambiguities
with a higher success rate and ratio value are confrmed
Integer FCB estimation as true values. Generally, the thresholds for P 0 and R 0 are
transformation set 0.999 and 2.0 (Li and Zhang 2015).
Once the integer values of ambiguities are confrmed,
FCB estimation the tight constraint is imposed on the estimation of foat
ambiguities:
N 1′ N 2 integer Inverse integer 0= (N − N ) − (N q,s − N q,n ) + (B q,s − B q,n )
˜ q,s
˜ q,n
ambiguity transformation FCB products r r r r r r (13)
Fig. 1 Flowchart of FCB estimation using the individual ambiguities Using Eq. (13), the ambiguity-fxed solutions for posi-
from the uncombined PPP model with the part of foat ambiguity tioning can be obtained after the PPP reprocessing. Note
solutions in the red rectangle and the FCB estimation in the blue that the constraint of integer ambiguity can also increase
rectangle
the precision of other estimated parameters.