
Page 208 - 《武汉大学学报(信息科学版)》2025年第9期
P. 208
1936 武 汉 大 学 学 报 (信 息 科 学 版) 2025 年 9 月
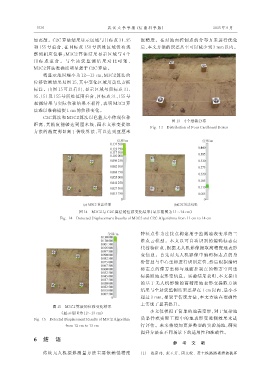
加离散。C2C 算法结果显示区域与目标点 31、95 级精度。在对地面控制点的分布方案进行优化
和 155 号重合,在目标点 151 号所处区域没有观 后,本文方法的误差甚至可以减少到 3 mm 以内。
察到相应位移;M3C2 算法结果显示区域与 4 个
目 标 点 重 合 。 与 全 站 仪 监 测 结 果 对 比 可 知 ,
M3C2 算法准确度明显强于 C2C 算法。
将显示范围缩小为 12~13 cm,M3C2 算法的
位移监测结果见图 15,其中变化区域用黄色方框
标注。由图 15 可以看出,显示区域与目标点 31、
95、151 及 155 号所处范围重合,目标点 31、155 号
观测结果与实际位移结果不相符,表明 M3C2 算
法难以准确捕捉 1 cm 的位移变化。
C2C 算法和 M3C2 算法以色值大小体现位移
图 13 4 个纸箱分布
距离,其精度能够达到厘米级,而本文形变提取
Fig. 13 Distribution of Four Cardboard Boxes
方法的精度明显高于传统算法,可以达到亚厘米
图 14 M3C2 与 C2C 算法的位移变化结果(显示范围为 11~14 cm)
Fig. 14 Detected Displacement Results of M3C2 and C2C Algorithms from 11 cm to 14 cm
特征点作为连接点构建用于监测地表变形的三
维点云模型。本文以可自动识别的编码标志点
代替特征点,根据无人机影像提取高精度地表形
变信息。首先对无人机影像中编码标志点的身
份信息与中心坐标进行识别定位,然后根据编码
标志点的像方坐标与地面控制点的物方空间坐
标提取地表形变信息。实验结果表明,本文提出
的基于无人机影像的高精度地表形变提取方法
结果与全站仪监测结果差异在 1 cm 以内,最小不
超过 3 mm,相较于传统方法,本文方法在准确性
上实现了显著提升。
图 15 M3C2 算法的位移变化结果
本文仅模拟了简单的地表变形,对于复杂地
(显示范围为 12~13 cm)
质条件或实际工程中的地表形变监测效果未进
Fig. 15 Detected Displacement Results of M3C2 Algorithm
from 12 cm to 13 cm 行评估。未来将增加更多类型的实验场地,研究
提升方法在不同场景下的适用性和准确性。
6 结 语
参 考 文 献
传统无人机摄影测量方法主要依赖低精度 [1] 范家玮, 张玉芳, 周文皎 . 黄土铁路路堤滑坡破坏