
Page 207 - 《武汉大学学报(信息科学版)》2025年第9期
P. 207
第 50 卷第 9 期 杨硕洁等:一种基于无人机影像的高精度地表形变提取方法 1935
5 讨论与分析 两侧;方案 5 和方案 7 将地面控制点分别设置在
实验场地的南北两侧;方案 8 的地面控制点为四
5.1 地面控制点分布的影响 点式分布,分别位于实验场地的 4 个方向。
地面控制点的分布是影响无人机航测结果 不同地面控制点分布方案对应目标点的位
精度的关键因素。参考徕卡 TM50 全站仪测量 移结果的均方根误差见图 12,所有方案的结果误
的地面目标点位移结果(见表 1),共设置 8 种地面 差均在 1 cm 以内,最小不超过 3 mm。其中方案 4
控制点分布方案以探讨地面控制点分布对该方 和方案 6 的结果误差明显大于其他方案,这表明
法监测精度的影响。 将地面控制点设置在编码标志点布局的长边比
8 种地面控制点分布方案如图 11 所示,其中 短边所得监测结果更准确。比较方案 6、方案 7 和
黄 色 标 记 点 为 地 面 控 制 点 ,红 色 标 记 点 为 地 面 方案 8 的结果可知,在控制点数目充足的前提下,
目标点。方案 1~方案 5 分别设置 8 个地面控制 将地面控制点分布于四边可进一步降低监测误
点 ,方 案 6~ 方 案 8 分 别 设 置 16 个 地 面 控 制 点 。 差。方案 6 和方案 7 的均方根误差远远小于方案
方案 1 和方案 2 的地面控制点为四点式分布,分 4 和方案 5,这表明在一定程度上增加控制点数目
别放置在实验场地的南部和北部;方案 3 的地面 可提高监测方法的精度。此外,比较方案 1、方案
控 制 点 成 块 分 布 ,位 于 实 验 场 地 的 南 侧 ;方 案 4 2 和方案 3 的结果可知,地面控制点呈四点式分布
和方案 6 的地面控制点分布在实验场地的东西 比成块分布更有利于提高地面形变监测精度。
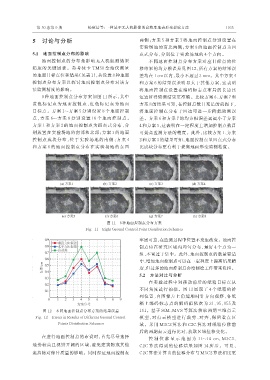
图 11 8 种地面控制点分布方案
Fig. 11 Eight Ground Control Point Distribution Schemes
牢固可靠,在监测过程中位置不发生改变。地面控
制点应在研究区域内均匀分布,最好 4 个点为一
组,不宜过于集中。此外,地面控制点的数量要适
中,增加地面控制点可以在一定程度上提高结果精
度,但过多的地面控制点会给测绘工作带来负担。
5.2 方法对比与分析
在实验过程中对移动前后的纸箱目标点从
不同角度进行拍摄。图 13 展现了 4 个纸箱的排
列位置,自图像左上角起顺时针方向观察,各纸
箱 上 编 码 标 志 点 的 解 码 值 依 次 为 31、95、155 及
图 12 不同地面控制点分布方案的结果误差 151。基于 SfM、MVS 等算法获取两期三维点云
Fig. 12 Errors in Results of Different Ground Control 模 型 ,对 点 云 模 型 进 行 裁 剪 、对 齐 ,保 留 重 点 区
Points Distribution Schemes 域。采用 M3C2 算法和 C2C 算法对纸箱位移前
后的两期点云进行比对,获取区域位移变化。
在进行地面控制点的布设时,首先尽量选择
控 制 位 移 显 示 范 围 为 11~14 cm,M3C2、
地势较高且视野开阔的区域,避免建筑物或其他 C2C 算 法 得 到 的 位 移 结 果 如 图 14 所 示 。 可 见 ,
遮挡物对像片质量的影响。同时保证地面控制点 C2C 算法计算出的位移分布与 M3C2 算法相比更