
Page 73 - 《武汉大学学报(信息科学版)》2025年第6期
P. 73
第 50 卷第 6 期 隋百凯等:基于几何先验约束的高点多视角损毁建筑物检测方法 1095
tan Φ )) 标位置即为所计算检测框中心损毁建筑物的真
Δα = arctan (9) 实地理坐标。
( cos( β - Δβ
当 Δα>0 时 ,表 示 其 他 建 筑 物 在 图 像 中 位 2 实验与结果分析
于 中 心 建 筑 物 的 左 边 ,因 此 需 要 在 中 心 建 筑 物
水平旋转角的基础上减去 Δα 的绝对值;当 Δα< 2.1 高点损毁建筑数据集构建
0 时,表示其他建筑物在图像中位于中心建筑物 本文利用地面高点监测设备长距离摄像机
的 右 边 ,因 此 需 要 在 中 心 建 筑 物 水 平 旋 转 角 的 以 及 大 疆 M300 无 人 机 倾 斜 摄 影 测 量 采 集 四 川
基 础 上 加 上 Δα 的 绝 对 值 。 由 此 可 以 求 得 当 其 省 雅 安 、汶 川 、泸 定 以 及 消 防 实 验 基 地 等 多 个
他 建 筑 物 位 于 图 像 中 心 时 摄 像 头 的 水 平 旋 地 区 的 建 筑 和 损 毁 建 筑 数 据 ,并 通 过 网 络 搜 集
转角。 多 个 灾 害 地 区 的 损 毁 建 筑 数 据 及 模 拟 生 成 等
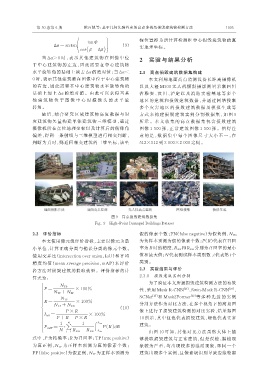
最 后 ,结 合 研 究 区 域 建 筑 物 高 度 数 据 与 对 方 式 来 构 建 损 毁 建 筑 实 例 分 割 数 据 集 ,如 图 9
应 建 筑 物 矢 量 构 建 单 体 建 筑 物 三 维 模 型 ,通 过 所 示 。 本 文 收 集 的 高 点 数 据 集 包 含 损 毁 建 筑
摄像机所在点位地理坐标以及计算后的俯仰角 图 像 1 500 张 ,正 常 建 筑 图 像 1 500 张 。 值 得 注
偏差,得到一条射线与三维模型进行相交判断, 意 的 是 ,数 据 集 中 每 个 图 像 尺 寸 大 小 不 一 ,在
判断为真时,则返回相交建筑的三维坐标,该坐 512×512 到 3 000×2 000 之间。
图 9 高点损毁建筑数据集
Fig. 9 High-Point Damaged Buildings Dataset
2.2 评价指标 假的像素个数;FN(false negative)为假负例, N FN
本文使用像元级评价指标,主要以像元为最 为负样本预测为假的像素个数;P(R)代表在召回
小单位,计算正确分类与错误分类的像元个数。 率为 R 时的精度,R min 和 R max 分别为召回率的最小
使用交并比(intersection over union,IoU)和平均 值和最大值;N 代表测试样本类别数,i 代表第 i 个
精 度 均 值(mean average precision,mAP)来 评 价 类别。
2.3 实验结果与评价
各方法对损毁建筑的提取效果。评价指标的计
2.3.1 损毁建筑实例分割
算式为:
为了验证本文所提损毁建筑检测方法的有效
ì N TP
ï N TP + N FP × 100% 性,采用 Mask R-CNN [23] 、Swin-Mask R-CNN [24] 、
ï P =
ï
ï
ï
ï
ï N TP SCNet [25] 和 Mask2Former [22] 等 多 种 先 进 的 实 例
ï R =
ï × 100% 分割方法作为对比方法,在多个视角下的高点图
ï
í N TP + N FN (10)
ï P × R 像上进行了损毁建筑检测的对比实验,结果如图
ï I IoU = P + R - P × R × 100% 10 所示,其中红色代表损毁建筑,绿色代表正常
ï
ï
ï
ï
N
ï
1
1
ï P mAP = N ⋅ ∑ R max - R min ∫ R max P ( R ) dR 建筑。
ï
ï
î
由 图 10 可 知 ,其 他 对 比 方 法 虽 然 大 体 上 能
i = 1
R min
式中,P 为精确率;R 为召回率;TP(true positive) 够提取损毁建筑与正常建筑,但是误检、漏检现
为 真 正 例 , N TP 为 正 样 本 预 测 为 真 的 像 素 个 数 ; 象较为严重,均出现较多的混淆现象,即同一个
FP(false positive)为假正例, N FP 为正样本预测为 建筑出现多个实例,且像素级识别导致边缘轮廓