
Page 51 - 《武汉大学学报(信息科学版)》2025年第6期
P. 51
第 50 卷第 6 期 王 坚等:超高层建筑变形 GNSS 多源融合监测方法及进展 1073
速度计积分模型基于 Mahony 互补滤波的扭转监
测模型的可靠性,以及 IMU 在超高层建筑振动监
测中的有效性,实现了对超高层建筑变形的监测。
4.2 超高层监测实例
超高层建筑在施工过程中受自身结构运动
及环境因素(如风载、震载等)影响,容易产生一
定程度的动态变形。本文采用 GNSS 多源融合
监测技术,对某超高层建筑施工阶段的爬升模架
进行了实时动态监测。监测项目采用“2+4”的
安 装 部 署 模 式 ,即 在 建 筑 周 围 对 称 设 置 2 台
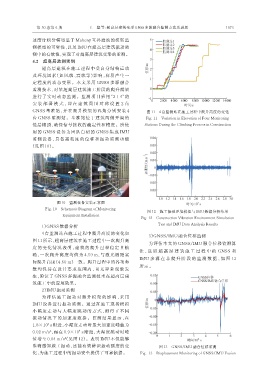
GNSS 基准站,并在爬升模架的四角分别安装 4 图 11 4 台监测站在施工过程中爬升高度的变化
台 GNSS 监测站。基准站位于建筑两侧开阔的 Fig. 11 Variation in Elevation of Four Monitoring
低层楼顶,确保信号接收的稳定性和精度。所使 Stations During the Climbing Process in Construction
用的 GNSS 设备为团队自研的 GNSS 集成 IMU
监 测 设 备 ,具 备 高 精 度 的 位 移 和 振 动 监 测 功 能
(见图 10)。
图 10 监测设备安装示意图
Fig. 10 Schematic Diagram of Monitoring
图 12 施工振动环境模拟与 IMU 数据分析结果
Equipment Installation
Fig. 12 Construction Vibration Environment Simulation
1)GNSS 数据分析 Test and IMU Data Analysis Results
4 台监测站在施工过程中爬升高度的变化如
3)GNSS/IMU 融合位移监测
图 11 所示,超高层建筑在施工过程中一次爬升高
为评估本文的 GNSS/IMU 融合位移监测算
度 的 变 化 情 况 表 明 ,建 筑 的 爬 升 过 程 稳 定 且 精
法 ,选 取 超 高 层 建 筑 施 工 过 程 中 的 GNSS 和
确,一次爬升高度均值为 4.59 m,与激光测距实
IMU 多 源 在 非 爬 升 阶 段 的 监 测 数 据 ,如 图 13
际爬升高度(4.60 m)一致。爬升过程中的各项参
所示。
数 均 保 持 在 设 计 要 求 范 围 内 ,且 无 异 常 现 象 发
生,验证了 GNSS 多源融合监测技术在超高层建
筑施工中的应用效果。
2)IMU 振动监测
为 评 估 施 工 振 动 对 爬 升 模 架 的 影 响 ,采 用
IMU 设备进行振动监测。通过在施工现场模拟
小 幅 度 走 动 与 大 幅 度 跳 动 的 方 式 ,测 得 了 不 同
振 动 情 况 下 的 加 速 度 数 据 。 监 测 结 果 显 示 ,在
1.8×10 s 附近,小幅度走动时最大加速度峰值为
4
0.02 m/s²,而在 1.9×10 s 附近,大幅度跳动时峰
4
值增至 0.04 m/s²(见图 12)。表明 IMU 不仅能够
准确感知施工振动,还能有效辨识振动强度的变 图 13 GNSS/IMU 融合位移监测
化,为施工过程中的振动安全提供了可靠依据。 Fig. 13 Displacement Monitoring of GNSS/IMU Fusion