
Page 49 - 《武汉大学学报(信息科学版)》2025年第6期
P. 49
第 50 卷第 6 期 王 坚等:超高层建筑变形 GNSS 多源融合监测方法及进展 1071
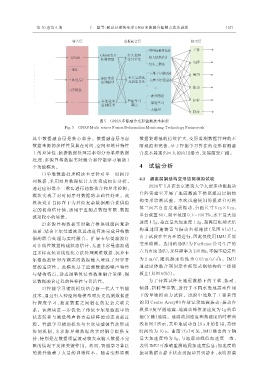
图 5 GNSS 多源融合变形监测技术框架
Fig. 5 GNSS Multi-source Fusion Deformation Monitoring Technology Framework
其 中 数 据 融 合 层 是 核 心 部 分 。 数据融合层考虑 数据资源池的持续扩大,变形监测数据管理的不
数据来源的多样性及其在时间、空间和统计特性 断规范和完善,基于智能学习算法的变形监测融
上的差异性,依据数据处理需求划分为单维数据 合技术展现出巨大的应用潜力,发展前景广阔。
处理、多源异构数据实时融合和智能学习辅助 3
个功能模块。 4 试验分析
1)单维数据处理模块主要针对单一时间序
4.1 超高层钢结构变形监测模拟试验
列数据,采用经典数理统计方法完成初步分析。
2024 年 5 月在北京建筑大学大型多功能振动
通过应用最小二乘法进行趋势拟合和异常检测,
台阵实验室开展了地震激励下模拟超高层钢结
模块实现了对时间序列数据的基础性处理。此
构变形监测试验。本次试验使用的振动台可模
模块设计目标在于为后续复杂数据融合提供稳
拟三向六自由度地震振动,台面尺寸 5 m×5 m,
定的初始估计值,适用于监测点数量有限、数据
波动较小的场景。 单台载重 60 t,频率范围 0.1~100 Hz,水平最大加
速度 1.5g,垂直最大加速度 1.2g,超高层框架式结
2)多源异构数据实时融合模块则面向复杂
构 通 过 固 连 装 置 与 振 动 台 相 连 接(见 图 6(a))。
场景,结合卡尔曼滤波及其改进算法完成异构数
由于试验在室内环境进行,因此仅使用 IMU 开展
据的联合处理与实时融合。扩展卡尔曼滤波针
对非线性数据构建状态估计,无迹卡尔曼滤波通 变形监测。选用的 IMU 为 ForSense 公司生产的
过采样点统计线性化方法处理高维数据,抗差卡 六自由度 IMU,采样频率为 100 Hz,零偏不稳定性
2
尔曼滤波针对含粗差的数据输入增强了对异常 为 2 m/s ,随 机 游 走 特 性 为 0.03 m/s/ h 。 IMU
值的适应性。此模块基于监测数据的噪声特性 通过固体黏合剂固定在框架式钢结构的二楼楼
与结构特点,动态调整算法参数和融合策略,保 板上(见图 6(b))。
证数据融合过程的鲁棒性与灵活性。 为了计算试件在地震激励下的平移、振动、
3)智能学习辅助模块结合新一代人工智能 倾斜、扭转等参数,进行了不同水准地震动作用
技术,通过引入神经网络模型对历史监测数据进 下的单轴拟动力试验。试验中选取了工程常用
行 深 度 学 习 ,捕 捉 数 据 之 间 潜 在 的 复 杂 关 联 关 的 El Centro Array#9 台站记录地震振动;振动台
系。该模块进一步优化了传统卡尔曼滤波中的 模拟 9 度罕遇地震、地震动峰值加速度为 1g 的单
状态转移与测量噪声协方差矩阵的动态更新过 轴(Y 轴)地震。地震动加速度和角速度的时程曲
程。智能学习辅助模块与卡尔曼滤波算法形成 线如图 7 所示,其中地震动自 10 s 开始作用,持续
协 同 机 制 ,为 多 源 异 构 数 据 的 实 时 融 合 提 供 支 时间约为 10 s。由图 7(a)可见,IMU 输出的 Y 轴
持,特别是在数据质量波动较大或输入数据不完 最大加速度约为 1g,与地震动峰值加速度一致,
整的情况下发挥关键作用。然而,智能学习算法 表明 IMU 可准确监测地震加速度信息;加速度的
的提升依赖于大量的训练样本。随着变形监测 振动数据由静止状态到振动再到静止,表明加载