
Page 223 - 《水产学报》2025年第11期
P. 223
李鹏鹏,等 水产学报, 2025, 49(11): 119618
开始 表 2 仿真模型材料参数
initiate
Tab. 2 Simulation model parameters
系统初始化 材料模型 仿真参数 数值
system initialization material model simulation parameter numerical value
菲律宾蛤仔 三轴尺寸/mm 21×14×11
SD 卡初始化 Ruditapes philippinarum triaxial dimension
example Initialize 泊松比 0.35
the SD card Poisson's ratio
颗粒密度/(g/cm ) 3 1.376
SD 卡 particle density
N 准备就绪? 弹性模量/MPa 8.2
SD card ready? modulus of elasticity
树脂 泊松比 0.38
Y resin Poisson's ratio
GPS 初始化 密度/(g/cm ) 3 1.117
GPS initialization density
播苗策略 弹性模量/MPa 1 000
seeding strategy modulus of elasticity
N 定位就绪?
positioning 离心盘转速、落料挡板开度
ready? centrifugal disc speed, 表 3 仿真模型接触参数
blanking baffle opening
Y Tab. 3 Simulation model contact parameters
播苗装置启动 人机交互 接触模型 仿真参数 数值
播苗
seeding device starts 显示 seeding contact model simulation parameter numerical value
interactive 菲律宾蛤仔-菲律宾蛤仔弹性恢复系数 0.25
display R. philippinarum- coefficient of elastic recovery
N 播苗就绪? R. philippinarum 静摩擦系数 0.37
seeding ready? 播苗结束? N
is seeding coefficient of static friction
over? 动摩擦系数 0.28
coefficient of dynamic friction
各信息传感器 结束 菲律宾蛤仔-树脂 弹性恢复系数 0.15
individual finish R. philippinarum- coefficient of elastic recovery
information sensor resin
静摩擦系数 0.266
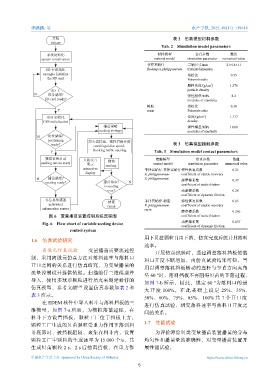
图 6 变量播苗装置控制系统流程图 coefficient of static friction
动摩擦系数 0.157
Fig. 6 Flow chart of variable seeding device
coefficient of dynamic friction
control system
用下贝苗颗粒自由下落,仿真完成后统计其落料
1.6 仿真试验研究
速率。
离散元仿真试验 变量播苗需要流速控
开展仿真试验时,通过调整落料挡板使落
制,采用离散元仿真方法对落料速率与落料口
料口开度不断增加,由仿真试验结果可知,当
开口之间的关系进行仿真研究,为变量播苗的
用以调整落料挡板转动的连杆与竖直方向夹角
流量控制设计提供依据。扫描蛤仔三维模型并
呈 60 °时,落料挡板不再阻碍贝苗的下落过程,
导入,使用多球形颗粒进行填充来创建蛤仔的
如图 7-b 所示,因此,规定 60 °为落料口的最
仿真模型,参考文献 [16] 设置仿真参数如表 2 和
大 开 度 100%。 在 此 基 础 上 设 定 25%、 35%、
表 3 所示。
50%、60%、75%、85%、100% 共 7 个开口度
在 EDEM 软件中导入料斗与落料挡板的三
进行仿真试验,研究落料速率与落料口开度之
维模型,如图 7-a 所示,为模拟落苗过程,在
间的关系。
料斗下方设置挡板,颗粒工厂位于挡板上方,
1.7 性能试验
颗粒工厂生成的贝苗颗粒受重力作用下落到料
斗底部时,被挡板阻隔,聚集在料斗内,设置 为评价滩涂贝类变量播苗装置播苗的分布
颗粒工厂中颗粒的生成速率为 15 000 个/s,共 均匀性和播苗量的准确性,对变量播苗装置开
生成贝苗颗粒 2 s,2 s 后抽离挡板,在重力作 展性能试验。
中国水产学会主办 sponsored by China Society of Fisheries https://www.china-fishery.cn
5