
Page 222 - 《水产学报》2025年第11期
P. 222
李鹏鹏,等 水产学报, 2025, 49(11): 119618
由图可得: 制器对执行机构的实时控制及交互界面的状态
显示及更新。
r 1 cosα = r 2 sinβ+e (2)
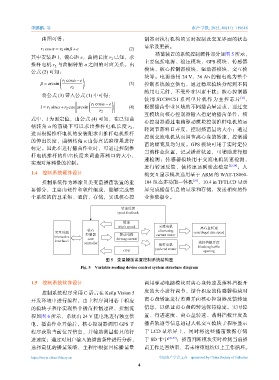
播苗装置的系统控制硬件部分如图 5 所示,
其中安装距 l,偏心距 e,曲柄长度 r 已知,求
1
主要包括电源、稳压模块、GPS 模块、传感器
推杆电机 r 与曲柄转角 α 之间的对应关系。由
2
公式 (2) 可知: 模块、核心控制器模块、驱动器模块、交互模
块等。电源选用 24 V、36 Ah 的锂电池为整个
( )
r 1 cosα−e
β = arcsin (3) 控制系统独立供电,通过稳压模块分配到不同
r 2
的用电元件,不受外在因素干扰;核心控制器
将公式 (3) 带入公式 (1) 中可得:
使用 STC89C51 系列单片机作为主控芯片 [21] ,
[ ( )]
r 1 cosα−e
l = r 1 sinα+r 2 cos arcsin (4) 根据播苗作业区域的不同播苗量需求,通过交
r 2
互模块向核心控制器输入指定的播苗条件,核
式中,l 为固定值,由公式 (4) 可知,在已知曲
心控制器通过电路驱动模块控制推杆电机的运
柄转角 α 的前提下可以求出推杆电机长度 r , 转调节落料口开度,控制播苗量的大小;通过
2
进而根据推杆电机的安装距求出推杆电机推杆
控制交流电机从而调节离心盘的转速,控制播
的伸出长度,曲柄转角 α 由仿真试验结果进行
苗的幅宽及均匀度。GPS 模块可用于实时定位
标定。因此在进行播苗作业时,可通过控制推
当前作业位置,记录播苗轨迹,可辅助进行船
杆电机推杆的伸出长度来调整落料口的大小,
速检测;传感器模块用于交流电机转速检测,
实现对落料量的控制。
进行转速反馈,使转速达到动态稳定 [22-24] ;人
1.4 控制系统硬件设计 机交互显示模块选用基于 ARM 的 WAT-T8060-
控制系统作为滩涂贝类变量播苗装置的重 104 组态多功能一体机 ,10.4 in TFTLCD 显示
[25]
要部分,主要由硬件和软件组成,能够完成整 屏完成播苗信息的显示和存储,发送相应的作
个系统的信息采集、通信、存储,实现核心控 业参数指令。
转速反馈
speed feedback
船速
ship's speed 交流电机 离心盘转速
核心 alternating
交互界面 控制器 驱动电路 centrifugal disc speed
interactive core driving circuit current motor
interfacei
controller 落料挡板开度
推杆电机 blanking baffle
push rod motor
GPS opening
图 5 变量播苗装置控制系统结构图
Fig. 5 Variable seeding device control system structure diagram
1.5 控制系统软件设计 调用驱动电路模块对离心盘转速及落料挡板开
控制系统程序采用 C 语言在 Keilμ Vision 5 度的大小进行调节,结合相应的传感器模块对
开发环境中进行编程,由主程序调用若干相应 离心盘转速进行监测并向核心控制器反馈转速
的模块子程序实现整个播苗控制过程,控制流 信息,以保证离心盘的转速保持稳定。实时位
程如图 6 所示,系统由 24 V 锂电池进行独立供 置、行进速度、离心盘转速、落料挡板开度及
电,播苗作业开始后,核心控制器调用 GPS 子 播苗轨迹等信息通过人机交互模块子程序显示
程序获取当前位置信息,并辅助测量船只的行 于 LCD 显示屏上,同时将这些播苗数据存储
进速度;通过对用户输入的播苗条件进行分析, 于 SD 卡中 [26-27] ;播苗判断模块实时检测当前播
选择最优的播苗策略,主程序根据目标播苗量 苗工作是否结束,若未结束继续以上工作循环。
https://www.china-fishery.cn 中国水产学会主办 sponsored by China Society of Fisheries
4