
Page 144 - 《水产学报》2025年第8期
P. 144
张铮,等 水产学报, 2025, 49(8): 089512
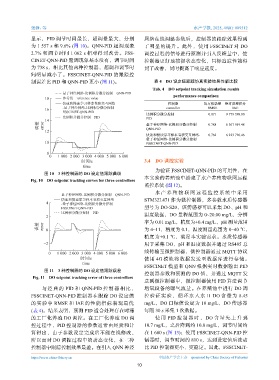
显示,PID 调节时间最长,超调量最大,分别 网络在线调整参数后,控制器的跟踪效果得到
为 1 557 s 和 9.6% (图 10)。QNN-PID 超调现象 了明显的提升。此外,使用 FSSCINET 对 DO
2.7% 和调节时间 1 062 s 相对得到改善。FSS- 调控过程的信号进行预测并引入反馈量中,使
CINET-QNN-PID 超调现象基本没有,调节时间 控制器更好地捕捉状态变化,目标追踪性能得
为 738 s,相比其他两种控制器,超调和调节时 到了改善,同时提高了响应速度。
间明显减小了。FSSCINET-QNN-PID 的跟踪控
制误差比 PID 和 QNN-PID 更小 (图 11)。 表 4 DO 设定值跟踪仿真实验结果性能比较
Tab. 4 DO setpoint tracking simulation results
量子神经网络-比例积分微分控制 QNN-PID
performance comparison
18 参考值`reference value
快速和慢速学习样本卷积交互网络 控制器 均方根误差 绝对误差积分
-量子神经网络-比例积分微分控制 controller RMSE IAE
16
FSSCINET-QNN-PID 比例积分微分控制 0.871 9 779 398.00
比例积分微分控制 PID PID
14
误差 error 量子神经网络-比例积分微分控制 0.788 6 307 959.48
QNN-PID
12
快速和慢速学习样本卷积交互网络- 0.762 6 223 710.46
量子神经网络-比例积分微分控制
10 FSSCINET-QNN-PID
8
0 1 000 2 000 3 000 4 000 5 000 6 000
时间/s 3.4 DO 调控实验
time 为验证 的可用性,在
图 10 3 种控制器的 DO 设定值跟踪曲线 FSSCINET-QNN-PID
本实验的养殖池中搭建了水产养殖物联网远程
Fig. 10 DO setpoint tracking curves for three controllers
监控系统 (图 12)。
水 产 养 殖 物 联 网 远 程 监 控 系 统 中 采 用
量子神经网络-比例积分微分控制 QNN-PID
快速和慢速学习样本卷积交互网络 STM32L471 作为微控制器,多参数水质传感器
4 -量子神经网络-比例积分微分控制
FSSCINET-QNN-PID 型号为 DO-S20,该传感器可以采集 DO、pH 和
`PID
比例积分微分控制 量程范围为 0~20.00 mg/L,分辨
2 温度数据,DO
率为 0.01 mg/L,精度为±0.4 mg/L,pH 测量范围
误差 error 0 为 4~11,精度为 0.1,温度测量范围为 0~40 ℃,
精度为±0.1 ℃,满足本实验需求。水质传感器
−2 用于采集 DO、pH 和温度数据并通过 RS485 总
线传输至微控制器,微控制器通过 MQTT 协议
0 1 000 2 000 3 000 4 000 5 000 6 000
时间/s 使用 4G 模块将数据发送至数据库进行存储。
time FSSCINET 模型和 QNN 根据实时数据输出 PID
图 11 3 种控制器的 DO 设定值跟踪误差
控制器参数和预测的 DO 值,并通过 MQTT 发
Fig. 11 DO setpoint tracking error of three controllers
送到微控制器中,微控制器使用 PID 算法调节
与经典的 PID 和 QNN-PID 控制器相比, 增氧设备的曝气流量。在养殖池中进行 DO 调
FSSCINET-QNN-PID 控制器在跟踪 DO 设定值 控验证实验,循环水入水口 DO 含量为 8.45
的实验中 RMSE 和 IAE 的性能指标表现最优 mg/L,DO 目标值设定为 10 mg/L,DO 传感器
(表 4)。结果表明,预测 PID 适合处理存在时滞 每隔 30 s 采集 1 次数据。
的工厂化养殖 DO 调控。在工厂化养殖 DO 调 使 用 PID 控 制 器 时 , DO 含 量 先 上 升 到
控过程中,PID 控制器的参数通常由经验和计 10.7 mg/L,之后降到约 10.0 mg/L,调节时间约
算得出,由于参数设定完成后不能在线修改, 在 1 680 s (图 13);使用 FSSCINET-QNN-PID 控
所以面对 DO 调控过程中的动态变化,在三种 制器时,调节时间约 810 s,达到设定值后波动
控制器中跟踪控制效果最差。在引入 QNN 神经 比 PID 控制器更小、更稳定。因此,FSSCINET-
https://www.china-fishery.cn 中国水产学会主办 sponsored by China Society of Fisheries
10