
Page 168 - 《软件学报》2026年第1期
P. 168
任睿晗 等: 面向整车系统的自动驾驶安全测试研究综述 165
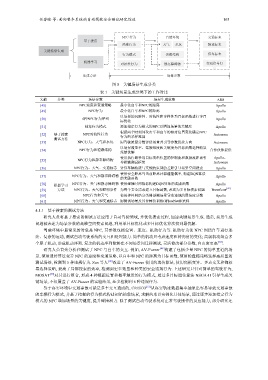
NPC 行为 自然环境 交通标志
基于搜索
简单行为 天气 水坑 限速标志
关键场景生成
行为模式 道路结构 停车标志
机器学习
对抗性行为 静态障碍物 交通信号灯
…
生成方法 场景参数
图 8 关键场景生成分类
表 1 关键场景生成分类下的工作对比
文献 分类 场景参数 场景生成策略 ADS
[48] NPC速度和变道策略 最小化自车和NPC的距离 Apollo
[49] NPC行为 最小化自车和NPC的距离 Apollo
以场景的风险性、对抗性和多样性为目标函数进行多目
[50] 4种NPC行为序列 Apollo
标优化
[51] 抽象行为模式 添加指定行为模式的NPC以增加场景的关键度 Apollo
根据两个时刻间攻击车和自车的相对位置变化确定NPC
[52] 基于搜索 NPC对抗性行为 行为的采样范围 Autoware
测试方法
[53] NPC行为、天气和水坑 用驾驶质量分数评估场景并引导参数优化方向 Autoware
以场景覆盖率、驾驶难度和关键度为目标函数选择帕累
[54] NPC行为和道路结构 合作伙伴提供
托最优解
使用执行路径与目标攻击位置的控制流和数据流距离引 Apollo、
[55] NPC行为和静态障碍物
导模糊测试框架 Autoware
[56] NPC行为、天气、交通标志 计算车辆轨迹与交规约束间的差距引导场景空间搜索 Apollo
使用安全距离与当前距离计算碰撞概率, 构建DQN算法
[57] NPC行为、天气和静态障碍物 Apollo
的奖励函数
[58] 机器学习 NPC行为、天气和静态障碍物 使用碰撞时间指标构建DQN算法的奖励函数 Apollo
[59] 方法 NPC行为、天气和照明条件 为每个安全需求建立目标函数, 表述为多目标搜索问题 Transfuser [62]
[60] NPC行为和天气 使用神经网络分类器预测场景导致违规的置信度分数 Apollo
[61] NPC行为、天气和交通标志 用测试场景及其鲁棒值训练GFlowNet并采样 Apollo
4.1.1 基于搜索的测试方法
研究人员将基于搜索的测试方法应用于自动驾驶领域, 并优化搜索过程, 加速关键场景生成. 通常, 场景生成
问题被表述为场景参数的高维空间搜索问题, 利用单目标优化或多目标优化算法找到最优解.
驾驶环境中最常见的对象是 NPC, 其参数包括位置、速度、机动行为等. 机动行为使 NPC 围绕自车进行连
续、复杂的运动, 测试自动驾驶系统的交互和处理能力. 简单的机动只考虑速度和转向角的变化; 高级机动组合多
个原子机动, 形成机动序列. 复杂的机动序列能够在不同场景间迁移测试, 灵活修改部分参数, 自由度更高 [63] .
研究人员首先分析和测试了 NPC 与自车的交互. 例如, AV-Fuzzer [48] 构建了包括少量 NPC 的简单直道的场
景, 使用遗传算法变异 NPC 的速度和变道策略, 以自车和 NPC 的距离为目标函数, 使用轮盘赌策略选择高质量的
测试场景, 检测到 5 种违规行为. Sun 等人 [49] 改进了 AV-Fuzzer 使用的遗传算法, 使用高斯变异、多点交叉和锦标
赛选择策略, 提高了局部搜索的效率, 检测到更多数量和种类的安全违规行为. 上述研究只针对简单的驾驶行为,
MOSAT [50] 对其进行组合, 形成 4 种根据位置和概率触发的行为模式, 通过多目标遗传算法 NSGA-II 引导生成关
键场景, 不仅覆盖了 AV-Fuzzer 的实验结果, 还多检测到 6 种违规行为.
鉴于真实环境中交通事故可能是多车交互造成的, CRISCO [51] 从真实轨迹数据集中抽象出容易导致交通事故
的车辆行为模式, 并基于挖掘的行为模式构建初始抽象场景, 求解约束以实例化具体场景, 通过逐步添加指定行为
模式的 NPC 增加场景的关键度, 提升碰撞潜力. 除了测试自动驾驶系统对正常驾驶操作的反应能力, 部分研究还