
Page 164 - 《软件学报》2026年第1期
P. 164
任睿晗 等: 面向整车系统的自动驾驶安全测试研究综述 161
的端到端方案. 目前, 端到端系统的主要设计方法是模仿学习或强化学习技术, 典型代表是英伟达的 DAVE-2 [27] 、
comma.ai 的 OpenPilot [28] .
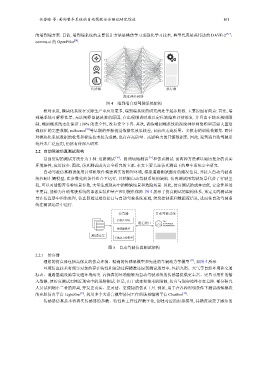
传感器 执行器
深度神经网络
图 4 端到端自动驾驶系统架构
相对来说, 模块化系统在实际生产中应用更多, 端到端系统的研究尚处于起步阶段. 主要原因有两点: 首先, 端
到端系统可解释性差, 无法阐释智能决策的原因, 在出现错误时难以定位缺陷和评估修复. 并且由于缺乏规则限
制, 端到端系统无法保证 100% 的安全性, 没有安全下界. 其次, 训练端到端系统的深度神经网络模型需要大量准
确标注的完整数据, nuScenes [29] 等早期的开源视觉数据集效果较差, 目前尚无高质量、多模态的训练数据集. 而针
对模块化系统数据的收集和标注技术较为成熟, 也存在高质量、高影响力的开源数据集. 因此, 端到端自动驾驶系
统并未广泛应用, 仍然有待深入研究.
2.2 自动驾驶仿真测试架构
目前常用的测试方法分为 3 种: 道路测试 [30] 、封闭场地测试 [31] 和仿真测试. 前两种方法难以遍历复杂的真实
环境条件, 应用较少. 因此, 仿真测试成为安全研究的主流. 本文主要关注仿真测试下的整车系统安全研究.
自动驾驶仿真测试使用计算机软件构建真实的物理环境, 模拟道路测试面对的路况信息, 并接入自动驾驶系
统控制车辆模型, 在参数化的条件组合下运行, 以挖掘自动驾驶系统的缺陷. 仿真测试用驾驶场景代替了行驶里
程, 可以灵活配置各种场景参数, 大量生成现实中的稀缺场景和危险场景. 因此, 仿真测试的成本更低, 安全性和效
率更高, 能够为自动驾驶系统的部署实装和量产应用提供保障. 图 5 展示了仿真测试的架构体系, 预定义的测试场
景在仿真器中渲染处理, 仿真器通过通信接口与自动驾驶系统连通, 转发控制流和数据流信息, 进而使自动驾驶系
统在测试场景中运行.
仿真器 自动驾驶系统
高保真环境
通信接口 THE
AUTOWARE
FOUNDATION
传感器模型
测试场景
车辆动力学模型
图 5 自动驾驶仿真测试架构
2.2.1 仿真器
理想的仿真器包括高保真的仿真环境、精确的传感器模型和先进的车辆动力学模型 [32] , 如图 5 所示.
环境仿真技术将现实对象的存在特性和运动过程精准还原到测试场景中, 包括光照、天气等自然环境和交通
标志、道路基础设施等交通环境两类. 高保真的环境能够为自动驾驶系统的传感器提供更丰富、更具可用性的输
入数据, 使仿真测试更接近现实中的道路测试. 但是, 由于成本和技术的限制, 仿真与现实始终存在差距. 部分研究
人员试图缩小二者的距离, 开发更真实、更灵活、更便捷的仿真工具. 例如, 用于在各种照明条件下测试感知模块
的光照仿真平台 LightSim [33] , 利用多个大语言模型协同工作的场景编辑平台 ChatSim [34] .
传感器仿真技术将真实传感器的参数、特性和工作过程数字化, 创建对应的虚拟模型, 其精度决定了感知的