
Page 167 - 《软件学报》2026年第1期
P. 167
164 软件学报 2026 年第 37 卷第 1 期
终, 执行结果和判断信息会反馈给测试用例生成环节, 指导生成关键度更高、覆盖面更全的测试场景.
4 面向整车系统的自动驾驶安全测试研究现状
目前的综述工作通常以测试方法作为分类依据, 将采用同一类技术方案的工作统一阐述. 然而, 随着安全研究
的逐渐深入, 针对同一问题已经提出了多样化的解决方案, 使得当前的分类方法难以适应技术发展的需求, 甚至会
割裂研究问题之间的相关性, 打断研究进展的连贯性, 使研究人员无法直观认知到某项研究问题的历史脉络和发
展趋势. 因此, 本文基于第 3 节总结的整车系统安全测试框架, 从子环节中提炼出核心研究问题, 并以此为基础将
研究工作划分为以下 5 类: 关键场景生成、测试充分性、对抗样本生成、测试优化和测试预言. 这种分类方法将
研究工作从技术层面下沉细化到问题层面, 将关注的焦点从具体技术手段转移到核心问题本身, 从而串联起一个
连贯而完整的测试流程. 同时, 该分类方法细致地梳理了不同测试阶段研究问题的需求、特征和对应的技术方案,
从而清晰地展现出自动驾驶安全测试中整车系统领域的发展轨迹, 为探寻和发掘潜在的安全问题开辟了新思路.
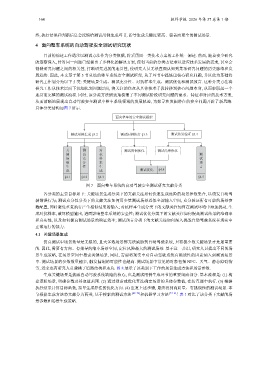
具体分类结构如图 7 所示.
面向整车的安全测试框架
测试用例生成 §3.2 测试用例执行 §3.3 测试结果验证 §3.4
关 测 对 测试用例优化 测试结果优化
键 试 抗 测
场 充 样 试
景 分 本 预
生 性 生 言
成 成 测试优化 §4.4
§4.1 §4.2 §4.3 §4.5
图 7 面向整车系统的自动驾驶安全测试研究文献分类
各分类的主要目标如下: 关键场景生成分类下的文献关注如何快速生成危险的场景参数集合, 以诱发自动驾
驶错误行为; 测试充分性分类下的文献关注如何用少量测试场景近似全部输入空间, 充分验证所有可能的场景参
数配置, 同时避免重复执行产生相似结果的输入; 对抗样本生成分类下的文献关注如何在测试环境中添加扰动, 生
成对抗样本, 破坏模型输出, 进而影响整车系统的安全性; 测试优化分类下的文献关注如何提高测试结果的准确率
和真实性, 以及如何提高测试场景的验证效率; 测试预言分类下的文献关注如何深入挑战自动驾驶系统在现实中
正常运行的能力.
4.1 关键场景生成
仿真测试中场景数量是无限的, 且大多数场景都无法威胁到自动驾驶系统, 只有极少数关键场景才是最重要
的. 因此, 需要有方向、有指导的缩小场景空间, 定位风险最大的测试场景. 基于这一共识, 研究人员提出不同的场
景生成策略, 在场景空间中搜索关键场景. 同时, 需要将现实中对自动驾驶系统有挑战性的因素纳入到测试场景
中. 测试场景的参数数量越多, 触发漏洞的可能性也越高. 测试场景中常见的对象包括 NPC、天气、静态障碍物
等, 近来也有研究人员建模了道路结构和水坑. 图 8 展示了该类别下工作的场景生成方法和场景参数.
生成关键场景是披露自动驾驶系统缺陷的核心, 也是测试用例生成环节的重要组成部分. 基本流程是: (1) 构
建逻辑场景, 明确参数及其取值范围. (2) 通过搜索或优化算法确定场景的具体参数值, 在仿真器中执行. (3) 根据
执行结果计算目标函数, 指导生成算法的优化方向. (4) 重复上述步骤, 最终得到高质量、有挑战性的测试场景. 本
节根据生成方法将文献分为两类, 基于搜索的测试方法 [48–56] 和机器学习方法 [57–61] . 表 1 对比了该分类下文献的场
景参数和场景生成策略.