
Page 173 - 《软件学报》2026年第1期
P. 173
170 软件学报 2026 年第 37 卷第 1 期
气和时间下的场景进行测试, 利用基于雅可比的显著性映射方法 (Jacobian saliency map algorithm, JSMA) [86] 和投影
梯度下降法 (projected gradient descent, PGD) [87] 生成对抗图像扰动, 并注入到仿真环境中车道旁边的广告牌中, 迫
使车辆发生转向错误, 甚至导致碰撞事故. Wu 等人 [80] 同样以转向角为目标, 设计出通用性对抗扰动, 并为车道旁
边的良性对象注入, 改变模型的转向预测, 攻击成功率远高于随机噪声方案.
为了生成针对性更强、实时性更强的对抗样本, 研究人员设计出涉及连续多帧的动态扰动, 结合车辆状态自
适应生成对抗样本. Jha 等人 [81] 在自动驾驶系统上部署恶意软件, 并利用前馈神经网络模型选择合理的干扰时机,
连续修改多帧像素, 使感知模块错误计算车辆和行人的轨迹. 实验结果表明, 为在系统层面引发安全事故, 至少需
要持续修改 14 帧涉及行人的图片或 48 帧涉及车辆的图片. 上述方法需要入侵车载系统, 接管汽车的传感器源, 攻
击过程较为复杂, 一些研究人员试图降低攻击难度. 借助路边的广告牌, Patel 等人 [82] 提出一种白盒对抗性攻击方
法, 根据车辆相对于广告牌的姿态信息动态生成对抗图像, 逐步修正车辆的方向和速度, 最终控制车辆的驾驶轨
迹, 该方法能够使转向角偏差 90°以上. von Stein 等人 [83] 耦合车辆轨迹仿真与对抗样本生成过程, 利用 PGD 算法
的思想自适应的生成对抗扰动, 使车辆执行恶意机动行为, 相比基准实验提升了 20.7% 的成功率.
4.3.3 小 结
该分类下的工作逐渐拓展测试目标, 从针对相机延展到针对激光雷达, 从针对单一传感器延展到针对多传感
器融合方案; 扰动类型也由单个静态扰动升级为自适应的动态扰动. 随着研究的深度和广度不断提升, 对抗测试的
可行性逐渐增加, 隐蔽性逐渐增强, 成功率也逐渐提高.
4.4 测试优化
测试优化是现有研究关注的方向之一, 有利于提高测试的速度和精度. 根据优化的阶段, 本节将测试优化工作
划分为两类, 即测试结果优化 [88–90] 和测试用例优化 [91–93] . 表 4 总结了各工作的具体优化方法.
表 4 测试优化分类下的工作对比
文献 分类 优化方法 ADS
[88] 多代理仿真使自动驾驶系统实例控制场景中的每一辆车 Apollo
[89] 测试结果优化 模糊测试生成静态障碍物, 蜕变测试筛选出误报 Apollo
[90] 训练了一个多模态模型筛选出误报 Apollo
[91] 使用代理模型替代仿真器搜索关键场景 Pylot
[92] 测试用例优化 使用因果模型筛选出可能引发违规的测试场景 Pylot
[93] 对现有数据集做测试约减和优先级排序 Apollo
4.4.1 测试结果优化
测试场景中的背景车辆通常由 PID 等简单算法控制, 仅根据预先规定的速度和驾驶策略行驶, 可能不会遵守
交通规则. 其智能性和自主性较差, 鲁莽的驾驶行为造成了大量误报. 除此之外, 仿真器的环境建模与现实世界有
偏差, 传感器建模与真实传感器也存在差距. 例如, 真实传感器可能被随机噪声影响, 仿真中传感器建模一般是理
想的; 即使在建模时加入噪声, 也难以确定是否符合现实分布. 因此, 测试结果不仅存在误报, 还可能无法在实车上
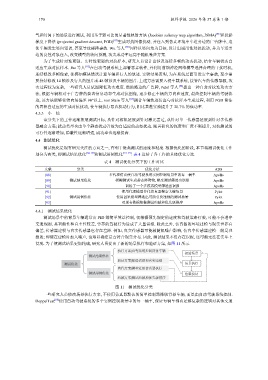
复现. 为了使测试结果更加精确, 研究人员提出了新的场景执行和验证方案, 如图 11 所示.
执行方案|自驾系统控制背景车辆
初始场景
测试结果优化
验证方案|筛选误报和真实违规
测试优化 场景执行
替代方案|模型近似仿真器执行
测试用例优化 结果验证
约减方案|测试约减和优先级排序
图 11 测试优化分类
一些研究人员修改场景执行方案, 不使用仿真器默认的简单控制器操纵背景车辆, 而是由自动驾驶系统控制.
DoppelTest [88] 使用自动驾驶系统的多个实例控制场景中的每一辆车, 保证每辆车都有足够复杂的逻辑对其他交通