
Page 488 - 《软件学报》2025年第4期
P. 488
1894 软件学报 2025 年第 36 卷第 4 期
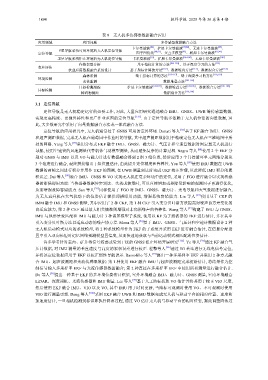
表 9 无人机多传感器数据融合应用
应用领域 应用问题 多传感器数据融合方法
卡尔曼滤波 [86] 、扩展卡尔曼滤波 [87,88] 、无迹卡尔曼滤波 [89] 、
卫星导航系统可用环境的无人机定位导航 [90,91] [92] [93,94]
定位导航 因子图优化 、交互多模型 、联邦卡尔曼滤波
卫星导航系统拒止环境的无人机定位导航 卡尔曼滤波 [95] 、扩展卡尔曼滤波 [96−100] 、无迹卡尔曼滤波 [101]
作物表型分析 基于指标计算的方法 [102−110] 、基于深度学习的方法 [111]
农业评估
农业应用数据融合系统设计 基于指标计算的方法 [112] 、数据堆叠方法 [113] 、数据混合方法 [114]
森林监测 基于指标计算的方法 [115−117] 、基于深度学习的方法 [118,119]
环境监测
水体监测 数据堆叠方法 [120−122]
目标检测跟踪 扩展卡尔曼滤波 [123,124] 、数据堆叠方法 [125,126] 、数据混合方法 [126−128]
目标检测
障碍物测距 数据混合方法 [129,130]
3.1 定位导航
定位导航是无人机稳定运行的必要工作, 对此, 大量应用研究通过融合 IMU、GNSS、UWB 等传感器数据,
以校正惯性导航误差. Bassolillo
实现更高精度、更强鲁棒性和更广作业范围的定位导航 [131] . 由于定位导航多依赖于无人机位姿的向量数据, 因
此, 大多数研究中采用了向量数据融合方法或一体式融合方法.
定位导航的应用研究中, 无人机通常处于 GNSS 可用的室外环境. Donati 等人 [86] 基于 KF 融合 IMU、GNSS
和超声测距数据, 完成无人机在葡萄园中作业时的导航, 其中超声测距数据用于精确定位无人机在三维地图中所
处的网格. Yang 等人 [87] 采用分布式 EKF 融合 IMU、GNSS、磁力计、气压计和空速管数据对固定翼无人机进行
导航, 使用空速管的风速测量代替机体气动模型测量, 从而避免复杂的计算过程. Negru 等人 [88] 使用 2 个 EKF 分
别对 GNSS 与 IMU 以及 VO 与磁力计进行数据融合得到 2 组 3 维位置, 然后应用 3 个门控循环单元网络分别从
3 个维度进行融合, 最终拼接输出 1 组位置估计, 由此提升定位精度和鲁棒性. You 等人 [89] 使用 IMU 数据在 UWB
数据的两帧之间进行积分并用作 UKF 的预测, 在 UWB 测量到达时完成 UKF 校正步骤, 以此降低 IMU 积分的累
积误差. Dai 等人 [90] 融合 IMU、GNSS 和 VO 实现无人机在复杂环境中的定位, 采用了 FGO 进行融合以实现传感
器的即插即用功能: 当传感器数据异步到达、失效或恢复时, 可以直接增加或移除受影响的观测因子再进行优化,
从而增强故障容错能力. Sun 等人 [91] 同样使用了 FGO 对 IMU、GNSS、磁力计、光电导航和大气数据进行融合,
为无人直升机在大气扰动下的位姿估计提供即插即用功能, 增强系统容错能力. Liu 等人 [92] 使用基于 CKF 的
IMM 融合 IMU 和 GNSS 测量, 其中应用了 2 种 CKF, 第 1 种 CKF 引入变分贝叶斯方法提高对噪声协方差变化的
自适应能力, 第 2 种 CKF 通过最大相关熵准则增强对非高斯噪声的鲁棒性. Wang 等人 [93] 构建了 IMU 与 GNSS、
IMU 与地形景象匹配和 IMU 与磁力计 3 种误差模型子系统, 使用以 KF 为子滤波器的 FKF 进行估计, 并在其中
引入变分贝叶斯方法以适应动态的噪声协方差. Moon 等人 [94] 基于 IMU、GNSS、气压计和空速计数据设计 2 种
无人机运动模式对应的系统模型, 将 2 种系统模型作为 FKF 的子系统并采用 EKF 进行融合估计, 在信息分配设
置中引入双向长短时记忆网络预测模型置信度, 从而快速地获取与当前运动模式相匹配的位姿估计.
许多学者针对室内、矿井等信号较弱或受到干扰的 GNSS 拒止环境开展研究 [132] . Ye 等人 [95] 通过 KF 融合气
压计数据, 对 IMU 测量的垂直速度与高度的累积误差进行校正. 程擎等人 [96] 通过 5G 基站进行无线电信号定位,
并将该定位数据应用于 EKF 等人 [97] 提出一种多采样率 EKF 并采用 2 种方式融
合 IMU、超声波测距和光流传感器数据: 第 1 种使用 EKF 融合 IMU 与超声波测距完成初始估计, 将结果作为控
制信号输入多采样率 EKF 与光流传感器数据融合; 第 2 种直接在多采样率 EKF 中使用所有测量进行融合估计.
Du 等人 [98] 提出一种基于 EKF 的多环境位姿估计框架, 室外环境融合 IMU、磁力计、GNSS 测量, 室内环境融合
LiDAR、深度相机、光流传感器和 IMU 测量. Lee 等人 [99] 基于人工地标获取 VO 估计并将其用于校正 VIO 尺度,
然后使用 EKF 融合 IMU、VIO 以及 VO, 其中 IMU 用于时间更新, 当路标可观测时使用 VO、不可观测时使用
VIO 进行测量更新. Dong 等人 [100] 采用 EKF 融合 UWB 和 IMU 数据完成无人机与移动平台的相对位置、速度和
加速度估计, 一旦相机检测到标识即执行降落过程, 通过 VO 估计无人机与移动平台的相对位姿, 据此调整降落过