
Page 486 - 《软件学报》2025年第4期
P. 486
1892 软件学报 2025 年第 36 卷第 4 期
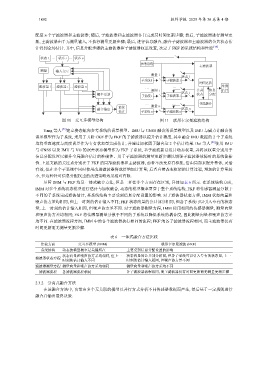
配至 n 个子滤波器和主滤波器; 随后, 子滤波器和主滤波器各自完成其时间更新步骤; 然后, 子滤波器进行测量更
新, 主滤波器由于无测量输入, 不执行测量更新步骤; 最后, 进行信息融合, 融合子滤波器和主滤波器的公共状态估
计得到全局估计. 其中, 信息分配步骤的主滤波器和子滤波器权重设置, 决定了 FKF 的系统结构和性能 [78] .
状态 1 … 状态 i … 状态 n
参 考 系 统
主滤波器
测量 输入交互
测量 1
状态 1
子 系 统 1 子滤波器 1
时 间 更 新
滤波器 1 … 滤波器 i … 滤波器 n … … 全局
测量 i 公共 信息 估计
概率更新 状态 i 状态 分配
子 系 统 i 子滤波器 i
… … 信 息 融 合
最优 测量 n
融合输出 状态 n
估计 子 系 统 n 子滤波器 n
状态向量和噪声协方差均相同, 但上一
图 10 交互多模型结构 图 11 联邦卡尔曼滤波结构
Yang 等人 [79] 建立姿态航向参考系统的误差模型、IMU 与 GNSS 融合的误差模型以及 IMU 与磁力计融合的
误差模型作为子系统, 采用了五阶 CKF 作为 FKF 的子滤波器以提升估计精度, 其中融合 IMU 数据的 2 个子系统
均将垂直速度与高度误差作为专有状态量完成估计, 并通过加权因子融合这 2 个估计结果. Dai 等人 [80] 使用 IMU
与 GNSS 以及 IMU 与 VO 的误差状态模型作为 FKF 子系统, 基于滤波新息设计动态权重, 并将该权重分别用于
信息分配设置以提升全局融合估计的准确性、用于子滤波器的测量更新步骤以增强子滤波器故障时的系统鲁棒
性. 上述文献的关注点分别在于 FKF 的局部滤波器和主滤波器, 前者不改变原有框架, 借由局部来提升整体, 灵活
有效, 但在多个子系统中同时使用改进滤波器将成倍增加计算量; 后者直接改变框架的计算过程, 增加的计算量较
小, 但这种针对信息分配权重的改进策略效果相对有限.
尽管 IMM 与 FKF 均是一体式融合方法, 但是二者在多个方面存在区别, 具体如表 6 所示. 在系统结构方面,
IMM 对多个系统状态模型进行估计与加权融合, 动态的模型概率贯穿于整个系统结构; FKF 将传感器测量分散于
不同的子系统完成滤波估计, 其系统结构主要受到信息分配设置的影响. 对于滤波器状态方程, IMM 状态向量和
噪声协方差均相同, 但上一时刻的估计输入不同; FKF 状态向量的公共部分相同, 但各子系统可以引入专有的状态
量, 上一时刻的估计输入相同, 但噪声协方差不同. 对于滤波器测量方程, IMM 使用相同的传感器测量, 测量向量
和噪声协方差均相同; FKF 将传感器测量分散于不同的子系统以降低系统的耦合度, 因此测量向量和噪声协方差
均不同. 在滤波器流程方面, IMM 中的各个滤波器执行相同的流程; FKF 的各子滤波器流程相同, 而主滤波器仅有
时间更新而无测量更新步骤.
表 6 一体式融合方法比较
比较方面 交互多模型 (IMM) 联邦卡尔曼滤波 (FKF)
系统结构 动态的模型概率是关键所在 主要受到信息分配设置的影响
状态向量的公共部分相同, 但各子系统可以引入专有的状态量, 上一
滤波器状态方程
时刻的估计输入不同 时刻的估计输入相同, 但噪声协方差不同
滤波器测量方程 测量向量和噪声协方差均相同 测量向量和噪声协方差均不同
滤波器流程 各滤波器流程相同 各子滤波器流程相同, 而主滤波器仅有时间更新而无测量更新步骤
2.3.2 分离式融合方法
在该融合方法中, 决策由多个无关联的模型以并行方式分析不同传感器数据而产生, 然后基于一定规则进行
融合并输出最终决策.