
Page 427 - 《软件学报》2025年第4期
P. 427
邹慧琪 等: 基于图神经网络的复杂时空数据挖掘方法综述 1833
总结来说, 基于时空图的大模型相关的工作目前仍然较少, 这可能是受限于大规模多样化时空数据的匮乏和
大模型对数值数据较弱的处理能力. 如何在时空图相关工作中引入更丰富的文本信息, 与 LLM 处理文本的优势相
结合, 并进行不同特征空间的对齐, 解决数据带来的噪声问题, 从而减小大模型幻觉 [74] 和提高模型的可解释性, 可
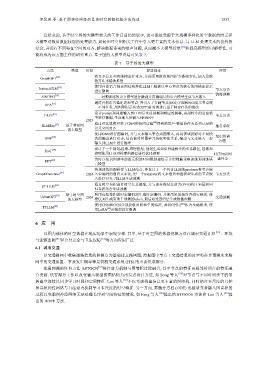
能将成为该方面工作的研究重点. 基于图的大模型总结可见表 7.
表 7 基于图的大模型
方法 类型 时间 算法描述 应用
将文本信息和图结构进行对齐, 并使用双阶段的图指令微调方法, 加入思维
[69]
GraphGPT
链方法来辅助推理
使用自然语言描述图结构并在LLM上根据以中心节点为核心的图描述提示
InstructGLM [75] 节点分类
进行微调
链路预测
SIMTEG [76] 对预训练的语言模型进行微调并用微调后的语言模型生成节点嵌入
通过自然语言描述边和节点, 并引入了兴趣节点(NOI)子图和NOI提示节点统
[77]
OFA
一不同任务, 用图形提示范式(GPP)针对图进行基于特定任务的修改
设计prompt和问题输入到LLM后生成预测和相应的解释, 再用较小的语言模
[63]
TAPE 节点分类
网中的交通流量、事故发生概率等是智能交通系统
型进行微调, 生成嵌入后输入到GNN中
2023
[67] 通过对比建模对基于GNN的协同过滤 [68] 得到的用户-物品协作关系和LLM的
RLMRec 基于普通图 推荐系统
的大模型 语义空间对齐
使用GNN进行图编码, 并与文本输入整合成图嵌入, 再用领域投影对不同模
[78] 知识图谱
GNP 态的输出进行对齐, 结合自监督图学习获取实体关系, 输出与文本嵌入一起
输入到LLM中进行推理 问答
设计了一个规划-检索-推理框架, 规划生成知识图谱相关的关系路径, 检索和
[79]
RoG
推理使用LLM对检索的路径进行优化推理 时序知识图
为时序知识图谱中的四元组的时间戳创建提示并用掩蔽策略训练预训练语 谱补全
[80]
PPT
言模型
将预训练的图模型与LLM结合, 并设计了一个包含LLM的producer将节点嵌
GraphTranslator [81] 2024 入中编码的信息文本化, 用一个translator将文本信息和图模型生成的节点嵌 节点分类
入进行对齐, 用LLM生成预测
通过时空卷积进行时空信息提取, 并与部分冻结注意力(PFA)的LLM层和回
[72]
ST-LLM
归卷积结合生成预测
UrbanGPT [73] 基于时空图 2024 利用包括卷积的时空编码器生成时空编码, 并使用轻量级对齐进行映射, 连 交通预测
的大模型 接LLM生成有助于预测的token, 最后通过回归层生成数值预测
使用CNN和GCN分别提取时间和空间特征, 并将GPT-2 [83] 作为基础模型, 使
TPLLM [82]
用LoRA [84] 对模型进行微调
6 应 用
以图为载体的时空数据在现实场景中表现多样. 其中, 基于时空图的数据挖掘方法在城市交通计算 [15] 、环境
与能源监测 [85] 和公共安全与卫生保障 [14] 等方面应用广泛.
6.1 城市交通
以交通路网中收集道路信息的监测点为基础建立路网图, 挖掘图中节点上交通信息的时空特征并预测未来路
(ITS) 的重要组成部分.
流量预测的经典方法 ASTGCN [13] 将注意力机制与图卷积过程融合, 其中节点的特征由相邻时间片的特征融
合更新. 还有部分工作以改变输入模型的图结构为出发点设计方法, 如 Song 等人 [86] 对节点与不同时间步下的邻
居建立连接以同步学习时间和空间特征. Lan 等人 [87] 不仅考虑构建信息更丰富的图结构, 同时结合多尺度的门控
图卷积神经网络与自注意力机制学习多尺度的时空特征. 另一方面, 常微分方程 (ODE) 也被研究者融入图卷积的
过程以克服图神经网络无法处理长序列空间特征的情况, 如 Fang 等人 [88] 提出的 STGODE 方法和 Luo 等人 [89] 提
出的 HOPE 方法.