
Page 472 - 《软件学报》2024年第4期
P. 472
2050 软件学报 2024 年第 35 卷第 4 期
n
V regio 对解析关键点关系效果明显.
采用不同阈值 τ 过滤关键点关系, 线性组合 3 种稀疏度 τ ( =0.35, 0.50 和 0.75) 生成动态稀疏关系矩阵. 分析 τ
取不同阈值 ( τ =0.35, 0.50 和 0.75) 及动态稀疏关系矩阵 R sp 对 HSC-Pose 性能的影响, 设计实验 5–实验 8, 如表 3.
dy
较之实验 4, 实验 5–实验 7 的实验结果表明 HSC-Pose 的 3DPCK re 分别提高 0.6% (实验 5), 1.0% (实验 6) 和 0.4%
l
(实验 7), 说明过滤关键点关系减少噪声传播效果明显. 较之实验 5, 实验 8 (采用线性层组合 3 种阈值的稀疏关系矩
阵) 并未展现出性能的显著提升, 因为这种组合权重等价于采用单一固定阈值, 相当于姿态共享. 较之实验 8, 实验 9
dy
的结果表明, HSC-Pose 的 3DPCK re 至少提高 0.3%, 说明 R sp 通过动态组合权重优化关键点关系稀疏度的方式效果明显.
l
姿态关联关键点关系描述模块 PKRM 的姿态估计组件涉及关键点包围框优化, 动态卷积和级联网络, 为此设
计 5 个实验, 见表 4. 关于关键点包围框优化和动态卷积, 较之基准模型, HSC-Pose 的 3DPCK re 分别提高 0.8% (实
l
验 2) 和 0.4% (实验 3). 两者组合提高 1.3% (实验 4). 这说明利用人体上下文优化关键点包围框有利于精确描述关
键点区域提议; 动态卷积利用人体上下文抑制包围框内残存噪声. 经级联优化的实验 (见实验 5), 较之实验 4, HSC-
Pose 的 3DPCK re 提高 2.6%.
l
表 4 PKRM 的姿态估计组件与 HSC-Pose 性能
编号 关键点包围框优化 动态卷积 级联优化 3DPCK rel (%)↑
1 - - - 81.2
2 √ - - 82.0
3 - √ - 81.6
4 √ √ - 82.5
5 √ √ √ 85.1
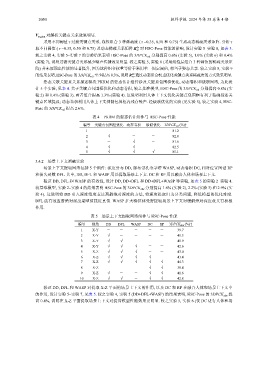
3.4.2 场景上下文消融实验
场景上下文提取网络包括 5 个组件: 深度分布 DD, 瀑布带孔金字塔 WASP, 动态卷积 DC, 相对位置图谱 RP
和损失函数 DFL. 其中, DD, DFL 和 WASP 用以提取场景上下文. DC 和 RP 用以融合人体和场景上下文.
验证 DD, DFL 和 WASP 的有效性, 设计 DD, DD+DFL 和 DD+DFL+WASP 等实验, 如表 5 的实验 2–实验 4.
较基准模型, 实验 2–实验 4 的结果表明 HSC-Pose 的 3DPCK ab 分别提高 1.6% (实验 2), 2.2% (实验 3) 和 2.9% (实
s
验 4). 这说明将 DD 引入深度维度表达离散绝对深度的方法, 将深度提取归为分类问题, 降低模型的优化难度.
DFL 能有效监督绝对深度期望值接近真值. WASP 扩大特征感受野提取场景上下文对缓解绝对深度歧义有积极
作用.
表 5 场景上下文提取网络组件与 HSC-Pose 性能
编号 视角 DD DFL WASP DC RP 3DPCK abs (%)↑
1 X-Y - - - - - 39.7
2 X-Y √ - - - - 41.3
3 X-Y √ √ - - - 41.9
4 X-Y √ √ √ - - 42.6
5 X-Z √ √ √ - - 43.0
6 X-Z √ √ √ √ - 43.4
7 X-Z √ √ √ √ √ 44.3
8 X-Z - - - √ √ 38.4
9 X-Z √ - - √ √ 41.6
10 X-Z √ √ - √ √ 42.8
验证 DD, DFL 和 WASP 对提取 X-Z 平面的场景上下文的作用, 以及 DC 和 RP 在融合人体和场景上下文中
的作用, 设计实验 5–实验 7, 见表 5. 较之实验 4, 实验 5 (DD+DFL+WASP) 的结果表明, HSC-Pose 的 3DPCK ab 提
s
高 0.4%, 说明在 X-Z 平面提取场景上下文对提高模型性能效果更明显. 较之实验 5, 实验 6 (仅 DC 进行人体和场