
Page 90 - 《软件学报》2021年第7期
P. 90
2008 Journal of Software 软件学报 Vol.32, No.7, July 2021
结果库中查询之前线下已经验证出的结果,从而及时给予系统反馈,获得实时、动态验证的效果,使得 hCPS 系统可
以智能、安全且及时地应对复杂多变的不确定性环境.对于训练好的驾驶行为分类模型,通过两组新的环境数据和
人工驾驶车辆的行车数据,我们得到的人工驾驶行为预测结果为:在场景 1,T 1 时刻,driver_style=NORMAL 的概率
为 85%;在场景 2,T 2 时刻,driver_style=AGGRESSIVE 的概率是 87%.将以上结果作为参数集输入到后续的 NSHA
模型中.
Table 2 The learning results of the classification learner
表 2 分类器学习结果统计
模型 准确率(%) 分类错误数量 预测速度(obs/s) 训练时间(s)
精细树 83.70 24 2 600 1.136 3
中等树 83.70 24 1 700 5.124 8
粗略树 81.60 27 1 700 5.035 7
精细 KNN 79.60 30 1 300 4.894 9
中等 KNN 78.90 31 1 900 2.064 6
粗略 KNN 76.20 35 1 800 2.35
余弦 KNN 78.90 31 2 200 3.374 7
3 次 KNN 76.90 34 2 800 3.265 2
加权 KNN 83.70 24 2 400 3.714
朴素贝叶斯 85.50 22 760 1.616 5
线性 SVM 78.90 31 1 200 3.731 1
二次 SVM 81.60 27 960 3.841 8
3 次 SVM 85.00 22 1 100 4.781 3
精细高斯 SVM 76.20 35 1 400 4.662 3
装袋树 85.00 22 200 11.638
子空间判别 82.30 26 170 12.516
子空间 KNN 79.60 30 130 12.403
RUSBooosted 树 76.90 34 230 12.846
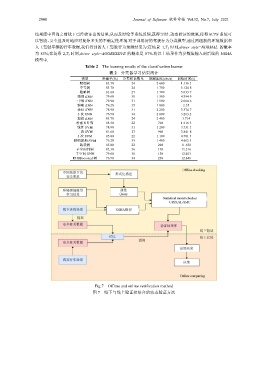
Fig.7 Offline and online verification method
图 7 线下与线上验证相结合的动态验证方法