
Page 86 - 《软件学报》2021年第7期
P. 86
2004 Journal of Software 软件学报 Vol.32, No.7, July 2021
行分类,该模型的分类准确率将作为概率参数输入到下一节的模型中.
2.1 分类流程
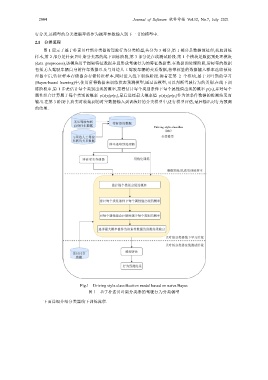
图 1 展示了基于朴素贝叶斯分类器的驾驶行为分类模型,共分为 3 部分,第 1 部分是数据预处理,获取训练
样本,第 2 部分是朴素贝叶斯分类器的线下训练阶段,第 3 部分是在线测试阶段.第 1 个模块是数据预处理模块
(data preprocess),该模块用于提取特征数据并且形成驾驶行为的特征数据集.在数据预处理阶段,带标签的数据
包括无人驾驶车辆自身的行车数据以及与周边人工驾驶车辆的关系数据,将带标签的数据输入样本选取预处
理器中后,特征样本存储器会存储特征样本,同时进入线下训练阶段.接着在第 2 个模块,基于贝叶斯的学习
(Bayes-based learning)中,使用所得数据来训练状态预测模型,通过该模型,可以判断驾驶行为的类别.在线下训
练阶段中,第 1 步是估计每个类别出现的概率,接着估计每个类别条件下每个属性值出现的概率 p(y i ),并对每个
属性组合计算属于每个类别的概率 p(x|y i )p(y i ),最后选择最大概率值 p(x|y i )p(y i )作为该条件数据的推测结果而
输出.在第 3 阶段中,将实时收集到的时空数据输入到训练好的分类模型中,进行模型评估,最后输出对行为预测
的结果.
Fig.1 Driving style classification model based on naïve Bayes
图 1 基于朴素贝叶斯分类器的驾驶行为分类模型
下面详细介绍分类器线下训练流程.