
Page 88 - 《软件学报》2021年第7期
P. 88
2006 Journal of Software 软件学报 Vol.32, No.7, July 2021
在该驾驶场景中,无人驾驶车辆(黑色)需要变道至人工驾驶的车辆(蓝色、红色)所在的车道上.图中,S 0 ,S 1 ,…,S n
表示不同时刻 T 0 ,T 1 ,…,T n 车辆所在的不同位置.上半部分表示场景 1:蓝色人工驾驶车辆减速行驶,黑色无人驾
驶车辆通过加速超车后完成变道.下半部分表示场景 2:红色人工驾驶车辆加速行驶,黑色无人驾驶车辆减速后
跟在人工驾驶车辆后方完成变道.
2.3.1 数据采集及预处理
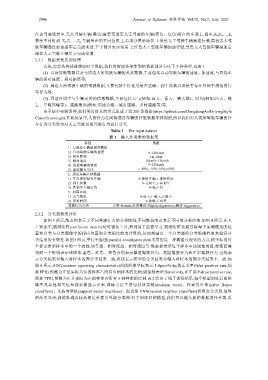
首先,需要从传感器获取时空数据,我们将智能体采集到的数据划分为以下 3 种类型,见表 1.
(1) 自身驾驶数据以及与周边人所驾驶车辆的关系数据,主要包括自动驾驶车辆的速度、加速度,与周边车
辆的相对速度、相对距离等;
(2) 周边人所驾驶车辆的驾驶数据,主要包括车灯使用是否正确、刹车次数以及是否存在其他不规范的行
车行为等;
(3) 周边环境中与车辆无关的信息数据,主要包括天气(例如:雨天、雾天、晴天等)、时间(例如:白天、晚
上、早晚高峰等)、道路情况(例如:高速公路、城市道路、乡村道路等)等.
由于缺少实验条件,我们采用仿真的方式生成了近 200 条数据(https://github.com/DongdongAn/DrivingStyle
Classification.git).在此场景中,人的行为是间接通过车辆的行驶数据来体现的,所以我们对人类所驾驶车辆的行
车行为分类即为对人工驾驶员的驾驶行为进行分类.
Table 1 The input dataset
表 1 输入分类器的数据集
类别 数据
1. 与周边车辆的相关数据
1) 自动驾驶车辆的速度 0~120km/h
2) 相对距离 1m~20m
3) 相对速度 –15km/h~15km/h
4) 周边车辆的速度 0~120km/h
5) 速度差百分比 –10%;–10%~10%;10%
2. 周边车辆其他数据
1) 车灯使用是否正确 0-使用正确;1-使用错误
2) 刹车次数 0-无刹车;1-有刹车
3) 其他不合规行为 0-无;1-有
3. 周围环境
1) 天气情况 0-雨天;1-晴天;2-雾天
2) 所处时间 0-夜晚;1-白天
驾驶行为分类 正常-Normal;轻度激进-SlightlyAggressive;激进-Aggressive
2.3.2 分类器效果评价
如图 3 所示,散点图表示了不同驾驶行为的分类情况,不同颜色的点表示不同的分类结果.如图 4 所示,在人
工智能中,混淆矩阵(confusion matrix)是可视化工具,特别用于监督学习.混淆矩阵是通过将每个实测像元的位
置和分类与分类图像中的相应位置和分类相比较来计算的,从而刻画出一个分类器的分类准确程度来验证分
类结果的有效性.如图 5 所示,平行坐标图(parallel coordinates plot)采用的是一种数据可视化的方式.横坐标的每
个标记表示样本中的一个属性,如车速、相对距离、相对速度等.纵坐标表示每个样本中该属性的值,相连而得
到的一个折线表示该样本.蓝色、红色、黄色分别表示激进驾驶行为、危险驾驶行为和正常驾驶行为.直线表
示分类结果与输入时样本的预分类结果一致,虚线表示模型的分类结果与输入时样本的预分类结果不一致.如
图 6 所示,ROC(receiver operating characteristic)曲线的横坐标表示:1-Specificity,伪正类率(false positive rate,简
称 FPR),预测为正但实际为负的样本占所有负例样本的比例;纵坐标表示:Sensitivity,真正类率(true positive rate,
简称 TPR),预测为正且实际为正的样本占所有正例样本的比例.表 2 给出了线下训练结果,每个模型训练后的准
确率及其他相关信息都会被显示出来.训练方法主要包括决策树(decision trees)、朴素贝叶斯(naïve Bayes
classifiers)、支持向量机(support vector machines)、最近邻 KNN(nearest neighbor classifiers)和组合分类器.最终
的结果显示,训练准确度较高的是朴素贝叶斯分类器.对于训练好的模型,我们可以输入新的数据进行分类,采