
Page 141 - 《摩擦学学报》2020年第6期
P. 141
824 摩 擦 学 学 报 第 40 卷
时主要仿生生物的微纳米级结构,无需任何复杂的化 贻贝的湿粘附能力(利用粘附蛋白与表面形成化学键
学合成或表面改性,以吸盘结构仿生为主要研究方向. 粘附)结合在一起,研发出一种混合粘合剂,如图10(c)
例如:韩国成均馆大学Baik等 [55, 103] ,国内吉林大学丛 所示. 该粘合剂通过将模仿贻贝足丝粘合蛋白成分制
茜教授课题组 [104] “偷师”章鱼,通过仿生章鱼的吸盘 造的薄聚合物,即p(DMA-co-MEA)涂层,覆盖在模仿
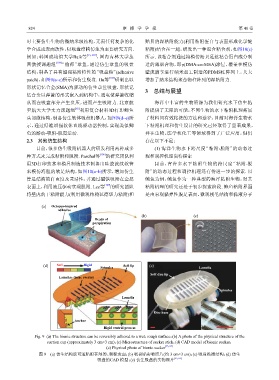
结构,制备了具有超强粘附特性的“吸盘贴”(adhesive 壁虎脚掌进行纳米加工制造的PDMS柱阵列上,大大
patch),如图9(a~c)所示和仿生吸盘. Hu等 [105] 研制出以 增加了纳米结构聚合物柱阵列的湿粘附力.
形状记忆合金(SMA)为驱动的仿生章鱼吸盘,形状记
3 总结与展望
忆合金以弹簧的形式嵌入到机构中,通电使弹簧收缩
从而在吸盘部分产生负压,进而产生吸附力. 北京航 海洋中丰富的生物资源为我们研究水下仿生粘
[65]
空航天大学文力课题组 利用复合材料3D打印䲟鱼 附提供了无限的可能,不同生物的水下粘附机理拓展
头部微结构,制备仿生软体吸盘机器人,如图9(d~e)所 了材料间有效粘接的方法和途径,目前对海洋生物水
示,通过纤维增强软体直线驱动器控制,实现类似䲟 下粘附机理和仿生设计的研究已经取得了显著成果,
鱼的游动-吸附-脱离运动. 并在生物、医学和化工等领域得到了广泛应用,但仍
2.3 其他仿生结构 存在以下不足:
目前,很多仿生吸附机器人的研发利用两种或多 (1) 海洋生物水下跨尺度“粘附-脱附”的动态过
种方式来完成粘附和脱附. Paschal等 [106] 的研究团队利 程和调控机理尚待探索
用3D打印技术和模具制造技术制备出硅胶波纹软管 目前,有许多水下粘附生物的跨尺度“粘附-脱
来模仿海胆的软足结构,如图10(a~b)所示,增加仿生 附”的动态过程和调控机理还有待进一步的探索. 以
管足结构的自由度及灵活性,并通过磁铁吸附在金属 鲍鱼为例,鲍鱼作为一种典型的海洋粘附生物,对其
表面上,利用液压驱动实现脱附. Lee等 [107] 的研究团队 粘附机理的研究还处于初步探索阶段. 鲍鱼粘附界面
将壁虎的干粘附能力(利用微观结构范德华力粘附)和 是由宏观黏弹性腹足表面、微观刚毛结构和黏液分子
(a) Octopus-inspired
adhesive
(b) (c)
Beads of
perspiration
(d) Soft Rigid Soft lip (e)
Spinules Lamella
Soft disc lip
Lamellae tissue overlay
Spinules
Lamella
Disc base
Anchor
Rigid ventral process
Fig. 9 (a) The bionic structure can be reversibly adhered to a wet,rough surface;(b) A photo of the physical structure of the
suction cup (approximately 3 cm×3 cm);(c) Microstructure of sucker stick;(d) CAD model of bionic sucker;
[55, 65]
(e) Physical photo of bionic sucker
图 9 (a) 仿生结构能可逆粘附在湿的、粗糙表面;(b) 吸盘贴实物照片(约 3 cm×3 cm);(c) 吸盘贴微结构;(d) 仿生
吸盘的CAD 模型;(e) 仿生吸盘的实物照片 [55, 65]