
Page 201 - 《高原气象》2025年第3期
P. 201
3 期 韩颂雨等:基于最优插值方法分析的雷达反演三维风场与再分析风场融合试验 759
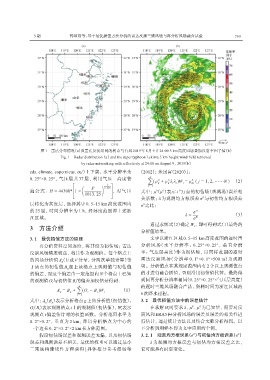
图1 雷达分布情况(a)及雷达反演组网的利奇马台风2019年8月9日24:00 5 km高度风场叠加反射率因子值(b)
Fig. 1 Radar distribution (a) and the super typhoon Lekima 5 km height wind field retrieved
by radar networking with reflectivity at 24:00 on August 9, 2019(b)
cds. climate. copernicus. eu/)上下载, 水平分辨率为 (2012); 朱国富(2020)]:
N
0. 25°×0. 25°, 气压层共 37 层, 利用气压—高度普 ∑ ( μ ij + μ ij λ i λ j )W i = μ jg ( j = 1,2,……N ) (2)
B
O
B
1
é ê ê P 5. 256 ú ú ) ù ú ú i = 1
ê
遍公式: H = 44300*ê1 - ú ú, 对气压 式中: μ(μ )表示 i 与 j 点的初估场(观测场)误差相
O
B
ê ê ( 1013. 25
ë û 关系数; λ 为观测均方根误差 σ 与初估均方根误差
O
层转化为高度层, 选择其中 0. 5~15 km 高度范围内 σ 之比:
B
的 25 层, 时间分辨率为 1 h, 经纬度范围即上述浙 σ O
江区域。 λ = σ B (3)
通过求解式(2)确定 W i , 即可得到式(1)最终的
3 方法介绍
分析值结果。
3. 1 最优插值方法的原理 文中以浙江区域 0. 5~15 km 高度范围的逐时再
再分析资料空间连续, 将其设为初估场; 雷达 分析风场(水平分辨率: 0. 25°×0. 25°, 垂直分辨
反演风场精度较高, 将其作为观测值。每个格点上 率: 气压层高度)作为初估场, 以同样范围的逐时
的风场分析值 A(U 或 V 分量, 分两次单独计算)等 雷达反演风场(分辨率 0. 1°×0. 1°×500 m)为观测
g
于该点的初估值 B 加上该格点上观测值与初估值 场。分析值点在其规定范围内有 2个以上观测值点
g
的偏差, 而这个偏差由一定范围内 N 个格点上已知 的才进行融合插值, 否则沿用初估值代替。最终得
的观测值O 与初估值B 的偏差加权估计得到: 到同再分析分辨率相同(0. 25°×0. 25°×气压层高度)
i
i
N 的逐时三维风场融合产品, 资料时间为浙江区域的
(1)
A g = B g + ∑ (O i - B i )W i
i = 1 6次降水过程。
式中: A(B)表示分析格点 g上的分析值(初估值), 3. 2 最优插值方法中的误差估计
g
g
O(B)表示观测格点 i上的观测值(初估值), W 表示 在求解 W 时要求 λ、 μ 、 μ 为已知量, 需要对反
B
O
i
i
i
i
观测点 i 偏差估计时的权重函数。分析范围水平为 演风和 ERA5再分析风场的误差及误差的相关性进
0. 2°×0. 2°, 垂直为 2 km, 即以分析格点为中心的 行估计, 通过统计方法以及结合文献分析得到。以
一个边长0. 2°×0. 2°×2 km长方体范围。 下分析所用样本即为文中应用的个例。
O
B
假设初估场误差和观测误差无偏, 以及初估场 3. 2. 1 观测均方根误差(σ )与初估均方根误差(σ)
误差和观测误差不相关, 最优的权重可以通过最小 λ 为观测均方根误差与初估均方根误差之比,
二乘法构建线性方程获得[具体推导参考潘旸等 它可能具有时空变化。