
Page 27 - 《爆炸与冲击》2026年第01期
P. 27
−3
−0.4
−
−
−
−
−
−3
−
−
−
−
−
−3
−
− −0.2 −3 − θ θ θ θ θ θ θ θ θ α α α α α α α α α − θ θ θ θ θ θ θ θ θ α α α α α α α α α
−
−1 −
− −
第 46 卷 李 尧,等: 结构体高速倾斜入水的尾拍载荷及姿态稳定性 第 1 期
10 0.06
10 First tail-slapping θ=90°, α=5°
8 8 6 0.04 θ=80°, α=5°
C mr /10 −3 4 0.02 θ=60°, α=5°
6 2 0
C mr /10 −3 4 −2 10 15 20 25 C mr −0.02 0
Time/ms
θ=80°, α=5°
2 θ=90°, α=5°
θ=60°, α=5° −0.04
0 −0.16
Sec tail-slapping
−2 −0.08
0 25 50 75 100 125 150 175 200 280 290 300 310 320 330 340
Time/ms Time/ms
(g) Rudder 4, impact and tail-slapping stage (h) Rudder 4, cavity collapse stage
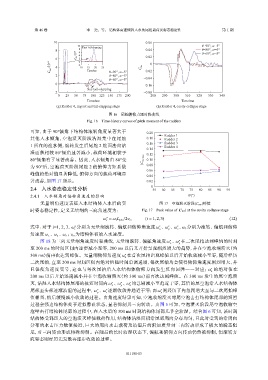
图 16 尾舵俯仰力矩时程曲线
Fig. 16 Time-history curves of pitch moment of the rudders
可知,由于 90°倾角下结构体滚转角度显著大于 0.20 Rudder 1
其他入水倾角,空泡溃灭阶段沾湿集中在尾舵 0.18 Rudder 2
0.16 Rudder 3
1 所在的迎水侧,滚转发生后尾舵 2 舵面法向沾 Rudder 4
0.14
湿面积相较 80°倾角显著减小,载荷环境相较于 0.12
80°倾角有了显著改善。因此,入水倾角由 80°变 |C mr | max 0.10
为 90°后,空泡溃灭阶段尾舵 2 的俯仰力矩系数 0.08
0.06
峰值的绝对值显著降低,俯仰方向的载荷环境显 0.04
著改善,如图 17 所示。 0.02
0
2.4 入水姿态稳定性分析 55 60 65 70 75 80 85 90 95
2.4.1 入水倾角对偏转角速度的影响 θ/(°)
无量纲角速度表征入水结构体入水后的实 图 17 空泡溃灭阶段 |C mr | 峰值
时姿态稳定性,定义无量纲的三向角速度为: Fig. 17 Peak value of |C mr | at the cavity collapse stage
∗
ω = ω i L pro /2v in (i = 1,2,3) (12)
i
式中:对于 ω ∗ ω ∗ ω ∗ ω ∗ ω i 分别为滚转、偏航和俯仰
i=1, 2, 3,
i 分别为无量纲滚转、偏航和俯仰角速度 x 、 y 、 z ,
ω z v in 为结构体初始入水速度。
角速度 ω x 、 ω y 、 ;
图 18 为三向无量纲角速度时程曲线,无量纲滚转、偏航角速度 ω ∗ x 、 ω ∗ y 在二次尾拍达到峰值的时刻
至 200 ms 的时间区间内逐步减小至零,200 ms 以后又开始呈现剧烈增大的趋势,并在空泡收缩溃灭(约
ω ∗ 在首次尾拍出现峰值以后开始收敛减小至零,随后经历
300 ms)前再次达到峰值。无量纲俯仰角速度 z
二次尾拍,直至 200 ms 时间区间内绝对值随时间单调递增,每次尾拍均会使得俯仰角速度剧烈增大,并
ω ∗ 的绝对值在
且促使角速度变号,这也与每次尾拍后入水结构体俯仰方向发生反向回弹一一对应; z
200 ms 以后开始迅速减小并在空泡收缩溃灭(约 300 ms)前再次达到峰值。在 300 ms 发生的尾空泡溃
ω ∗ ω ∗ ω ∗ 均急剧减小至趋近于零,其后的尾空泡沿入水结构体
灭,沾湿入水结构体尾部的极短时间内 x 、 y 、 z
ω ∗ ω ∗ ω ∗ 则经历了先急剧增大至与二次尾拍峰
尾部至头部逐渐沾湿的过程中, y 、 z 逐渐收敛并趋近于零;而 x
值相当,然后缓慢减小收敛的过程。由角速度结果可知,空泡收缩溃灭时尾空泡击打结构体尾部的短暂
过程会强迫结构体处于近似静止状态,显著抑制其三向转动。由图 5 可知,空泡溃灭阶段尾空泡收缩空
泡壁击打结构体尾部的过程中,在入水后的 300 ms 时刻结构体尾部几乎全沾湿。结合图 6 可知,该时刻
结构体受到巨大的空泡溃灭峰值载荷作用,结构体沾湿面积沿尾部周向分布均匀,且此时受到的沿周向
分布的水击压力数值接近,巨大的周向水击载荷及沾湿后的附加质量对三向转动形成了极大的瞬态阻
尼,对三向转动形成特殊抑制。在随后的长时沾湿状态下,偏航和俯仰方向转动仍然被抑制,但滚转方
向姿态则经历先发散再逐步收敛的过程。
011101-13