
Page 26 - 《爆炸与冲击》2026年第01期
P. 26
第 46 卷 李 尧,等: 结构体高速倾斜入水的尾拍载荷及姿态稳定性 第 1 期
下,结构体也发生了偏航方向的姿态偏转,导致结构体向尾舵 2 一侧倾躺,因此空泡溃灭阶段,尾舵 2 的
C φ 绝对值显著高于尾舵 4。根据上述分析,入水倾角为 90°时结构体尾部在前置尾拍过程中仅迎水侧部
分沾湿,空泡溃灭时受空泡壁拍击的载荷分布呈现明显的非对称性,而其他入水倾角下结构体尾部表面
更接近均匀沾湿;且 90°倾角下结构体滚转角度显著大于其他倾角,空泡溃灭阶段沾湿集中在尾舵 1 所
在的迎水侧,滚转发生后尾舵 2 载荷环境相较于 80°倾角有了显著改善(沾湿面积减小),因此,90°倾角条
件下空泡溃灭阶段尾舵 2 法向力系数峰值的绝对值较 80°倾角显著减小。综上,80°~90°大倾角入水有
利于改善空泡溃灭时刻尾舵 2、3、4 的法向载荷环境,但会恶化尾舵 1 的法向载荷环境。
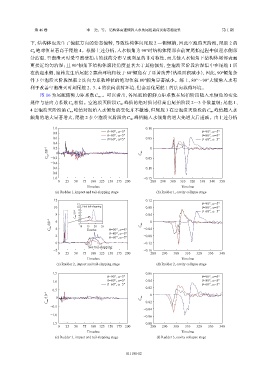
图 16 为尾舵俯仰力矩系数 C mr 。可以看出,各尾舵的俯仰力矩系数在尾拍阶段随入水倾角的变化
C mr 峰值的绝对值同样高出尾拍阶段 个数量级;尾舵 1、
规律与法向力系数 C φ 相似。空泡溃灭阶段 2~3
4 空泡溃灭阶段的 C mr 峰值对初始入水倾角的变化并不敏感,但尾舵 3 在空泡溃灭阶段的 C mr 峰值随入水
倾角的增大显著增大,尾舵 2 在空泡溃灭阶段的 C mr 峰值随入水倾角的增大先增大后递减。由上述分析
1.0 0.10
θ=90°, α=5° θ=90°, α=5°
0.8
θ=80°, α=5° θ=80°, α=5°
0.6 θ=60°, α=5° 0.05 θ=60°, α=5°
0.4
0.2
C mr /10 −3 −0.2 0 C mr 0
−0.4 −0.05
−0.6 −0.10
−0.8
−1.0 −0.15
0 25 50 75 100 125 150 175 200 280 290 300 310 320 330 340 350
Time/ms Time/ms
(a) Rudder 1, impact and tail-slapping stage (b) Rudder 1, cavity collapse stage
12 0.12
12 θ=90°, α=5°
10 10 First tail-slapping 0.08 θ=80°, α=5°
8
8 C mr /10 −3 6 4 2 0.04 θ=60°, α=5°
C mr /10 −3 6 4 −2 0 10 15 20 25 θ=90°, α=5° C mr −0.04 0
Time/ms
θ=80°, α=5°
2 −0.08
θ=60°, α=5°
0 −0.12
Sec tail-slapping
−2 −0.16
0 25 50 75 100 125 150 175 200 280 290 300 310 320 330 340
Time/ms Time/ms
(c) Rudder 2, impact and tail-slapping stage (d) Rudder 2, cavity collapse stage
1.5 0.06
θ=90°, α=5° θ=90°, α=5°
1.0 θ=80°, α=5° 0.04 θ=80°, α=5°
θ=60°, α=5° θ=60°, α=5°
0.02
0.5
C mr /10 −3 0 C mr −0.02 0
−0.5
−0.04
−1.0
−0.06
−1.5 −0.08
0 25 50 75 100 125 150 175 200 280 290 300 310 320 330 340
Time/ms Time/ms
(e) Rudder 3, impact and tail-slapping stage (f) Rudder 3, cavity collapse stage
θ α
011101-12 θ α
−3
θ α
−3
−
θ α −
θ α
θ α −
−
− −