
Page 135 - 《爆炸与冲击》2023年第2期
P. 135
第 43 卷 陈源捷,等: 基于ESGA遗传算法的水射流自驱旋转喷头优化设计 第 2 期
要。在实际应用中,泵压、流量、喷嘴孔径、旋转半径给定的情况下,本文中基于李安贵等 [17] 总结的双喷
嘴旋转速度与各工况参数之间的关系,以自旋转喷头达到某一预设旋转速值为目标,计算各喷嘴的最佳
冲击角。
2 基于 ESGA 遗传算法的喷头优化布局
2.1 数学模型
通过对旋转射流喷头运动时的扫掠冲击轨迹进行理论分析,建立喷头的扫掠冲击离散化时间优化
模型。然后结合实际工况,如压力、流量、载体平台移动速度、喷头转速、喷嘴孔径、冲击角等,研究不
同喷头布局对冲击轨迹线疏密程度的影响。最后,以旋转射流喷头移动路径垂直方向上的能量分布均
匀度为优化目标,建立优化目标函数,利用基于“锦标赛选择”策略的 ESGA 算法对目标函数进行优化
求解。
2.1.1 喷头扫掠冲击轨迹模型
在进行自驱旋转射流喷头除锈作业时,每 Sweep trajectory
个喷嘴的运动轨迹可以看作是喷嘴绕喷头旋转 L
轴的匀速圆周运动与喷头整体相对较慢的匀速
y
平移运动合成的结果 [14] ,运动轨迹呈螺旋状。匀
速平移运动的速度取决于载体机器人的爬行平
O
移速度,匀速圆周运动的转速由喷头的旋转力矩
W
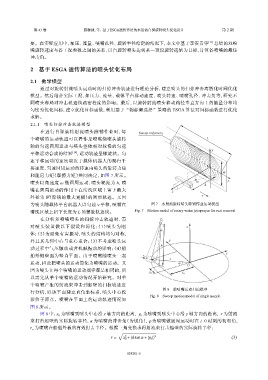
和阻尼力矩(摩擦力矩)共同决定,如图 7 所示。
喷头以角速度 ω 做圆周运动,喷头靶距为 h,喷 ω h x
嘴在圆周运动的作用下在清洗区域上留下最大 z
v
外径为 W(除锈的最大宽幅)的圆形轨迹。又因
为喷头随载体平台机器人以匀速 v 平移,喷嘴在 图 7 水射流旋转喷头除锈作业运动模型
清洗区域上留下长度为 L 的螺旋轨迹线。 Fig. 7 Motion model of rotary water jet sprayer for rust removal
在分析多喷嘴喷头的扫掠冲击轨迹时,需
对 喷 头 装 置 做 以 下 假 设 和 简 化 : ( 1) 喷 头 为 刚 z
α
体;(2)为避免有害振动,喷头的结构均匀对称,
并且其几何中心与重心重合;(3)不考虑喷头运 y
h
动过程中气压脉动或者机械振动的影响;(4)船
舶外侧壁面为竖直平面。由于喷嘴随喷头一起 r v x
r
运动,因此把喷头的运动简化为喷嘴的运动。又 ϕ
O
因为喷头上每个喷嘴的运动规律都是相同的,所
y 0 x 0
以需先从单个喷嘴的运动情况开始研究。对单
个喷嘴产生的射流束冲击到船壁的扫掠轨迹进
图 8 单喷嘴运动扫掠模型
行分析,以该平面建立直角坐标系,喷头中心投
Fig. 8 Sweep motion model of single nozzle
影位于原点。喷嘴在平面上的运动轨迹情况如
图 8 所示。
图 8 中:x 为喷嘴到喷头中心沿 x 轴方向的距离, y 为喷嘴到喷头中心沿 y 轴方向的距离, r 为射流
0
0
束打击船壁的实际旋转半径,α 为喷嘴的冲击角(为锐角), φ 为喷嘴做圆周运动时在 t=0 时刻的初相角,
r 为喷嘴在船舶外板的有效打击半径。根据三角变换求得射流束打击船壁的实际旋转半径:
v
»
2
r = x +(htanα+|y 0 |) 2 (3)
0
024201-5