
Page 73 - 《软件学报》2020年第9期
P. 73
2694 Journal of Software 软件学报 Vol.31, No.9, September 2020
边缘数据中心间的数据传输问题,提出了一种自适应离散粒子群优化算法(GA-DPSO),以缩短数据传输时
间.Ren 等人 [26] 为更好地适应边缘计算应用,开发了一种基于微内核的操作系统 EdgeOS.然而,目前针对模型计
算任务划分的研究相对较少.尝试针对基于深度神经网络的算法模型进行更细致的计算任务划分,结合边缘计
算,解决深度学习技术在嵌入式领域应用性较差的问题.
1.3 目标追踪系统应用场景分析
追踪算法处理流程可分为多个阶段,且算法具有基本相同的处理步骤,这为边缘计算的应用提供了可行性.
通过追踪任务进行分割,采取不同阶段不同节点计算的策略.针对不同处理阶段,可以将相同计算任务进行特殊
优化,如采用 FPGA 等设备进行预处理阶段中图像剪裁、图像增强、傅里叶变换等操作,将深度特征提取等运
算卸载至边缘云,以减小本地计算压力及功耗.
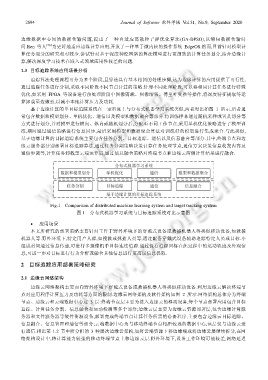
基于边缘计算的单目标追踪系统在一定程度上与分布式机器学习系统类似,两者对比如图 1 所示,后者通
常包含数据和模型划分、单机优化、通信以及模型和数据聚合等部分.将训练样本通过随机采样或置乱切分等
方式进行划分,并对模型进行横向、纵向或随机划分后,分配至不同工作节点,采用单机优化策略进行子模型训
练,期间通过通信策略进行信息同步,最后采用模型和数据聚合算法对训练好的模型进行集成聚合.与此类似,
基于边缘计算的目标追踪系统主要包含任务分割、目标追踪、通信以及信息融合等部分.其中,终端节点和边
缘云服务器分别部署目标追踪算法,通过任务分割策略决策计算任务处理节点,通信方案决策信息收发内容及
通信步调等,计算任务卸载至云端运算后,通过信息融合策略对终端节点和边缘云两侧计算结果进行融合.
Fig.1 Comparison of distributed machine learning system and target tracking system
图 1 分布式机器学习系统与目标追踪系统对比示意图
• 应用场景
本文所研究的部署策略主要针对工作于野外环境下的穿戴式设备或救援机器人等类似移动设备,如救援
机器人等.野外环境下,特定用户人群,如搜救或抓捕人员等,通过配备穿戴式设备辅助追踪特定人员或目标.小
组成员间通过信息传递,可进行多摄像机单目标连续追踪.通过保存追踪目标在此过程中的运动轨迹及外观信
息,可进一步对目标进行行为分析或融合其他信息进行更高层信息提取.
2 目标追踪应用部署策略研究
2.1 边缘云网络架构
边缘云网络架构主要面向野外环境下穿戴式设备或救援机器人等类似移动设备.利用边缘云解决终端节
点对应用程序计算压力及功耗等方面的限制.边缘云网络架构及软件架构如图 2 所示.网络架构总体分为终端
节点、边缘云和云端数据中心这 3 层:终端节点层主要为接入边缘云的移动设备,每个节点部署应用包含目标
追踪、计算任务分割、信息融合和运动检测等多个部分;边缘云层主要为边缘云资源部署层,包含边缘计算服
务器和文件服务器等硬件资源设备,部署完成终端节点计算任务所需的必要程序,主要包含边缘云目标追踪、
信息融合、信息管理和通信等部分;云端数据中心为与移动终端节点相距较远的数据中心,该层仅与边缘云进
行通信.相比第 1.2 节中所分析的 3 种层次边缘云架构,如将云端资源下移边缘端或将边缘云层继续拆分,在网
络架构设计中,将计算能力较强的移动终端节点上移边缘云层.野外环境下,设备工作环境可能较差,网络延迟