
Page 76 - 《软件学报》2020年第9期
P. 76
张展 等:面向边缘计算的目标追踪应用部署策略研究 2697
新,从而避免了追踪过程中的复杂计算,使得算法性能满足实时追踪任务要求.通过相似性度量函数对样本图片
和候选图片之间的相似度进行计算,可以对两者间的相似程度进行衡量,并返回对相似程度进行评分,相似度越
高,则分数越高.算法采用全卷积孪生神经网络作为相似性度量函数.该算法在处理速度和追踪性能上均有取得
了良好表现,也由此引起众多学者基于全卷积孪生神经网络的进一步研究改进.由于算法采用相似性学习的角
度解决追踪问题,算法可采用大量视频序列对模型进行离线训练,因此针对特定场景下的目标追踪任务可以采
取预先收集相似场景数据以更好地训练模型,从而取得更好的性能.
2.3 任务分割策略
基于边缘计算的追踪系统,常用任务卸载策略为将全部计算任务卸载至边缘云.另一种策略,以算法
[3]
HCFT 为例,由于根据多个卷积层输出的特征图学习多个不同的相关滤波器,因此可根据设备负载状态及网络
环境,动态判定所学习的滤波器个数.与此不同,本文根据算法的处理阶段对计算任务进行划分,如预处理及特
征提取计算量较小,而此时网络延迟较大,则可将该部分计算任务本地运算;且由于搜索区域相比整张图片区域
更小,因此处理后信息传输量更小,降低了网络传输延迟.此外,由于在终端节点和边缘云服务器分别部署不同
的目标追踪算法,通过任务分割策略决策计算任务本地计算、卸载至边缘云计算或同时计算后融合,最后通过
信息融合策略,对不同种算法计算结果进行集成.
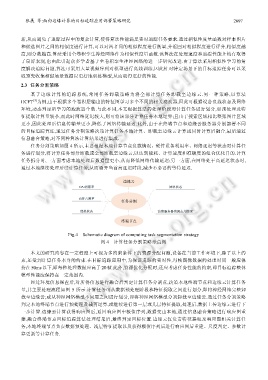
任务分割策略如图 4 所示,主要根据本地计算节点负载情况、硬件设备利用率、网络延迟等状态对计算任
务进行划分,将计算任务部分卸载或全部卸载至边缘云,以达到能耗、计算速度和准确度的组合优化目的.计算
任务拆分时,一方面考虑本地处理后数据量更小,从而降低网络传输延迟;另一方面,在网络处于高延迟状态时,
通过本地继续处理后续计算任务,从而避开当前高延迟时段,减少不必要的等待延迟.
边缘云
CPU利用率 网络状态
内存占用率
任务分割
能耗状态 边缘服务器资源占用情况
终端节点
Fig.4 Schematic diagram of computing task segmentation strategy
图 4 计算任务分割策略示意图
本文的研究内容在一定程度上可视为多约束条件下的资源分配问题,设备在当前工作环境下,除了以上约
束,还受到计算任务本身的约束.在目标追踪应用中,为保证追踪的实时性,每帧图像数据的处理时间一般应保
持在 50ms 以下,即每秒处理数据应高于 20 帧.此外,资源优化分配时,还应考虑任务性能的约束,即目标追踪整体
模型性能应保持在一定范围内.
经过环境信息探查后,对所得信息进行融合后判定计算任务分割点,决策本地终端节点和边缘云计算任务
量,其主要处理流程如图 5 所示.计算任务可从数据预处理阶段和特征提取之间进行划分,即将神经网络完整卸
载至边缘云;或从神经网络模型不同层之间进行划分,即将神经网络模型分割卸载至边缘云.通过任务分割策略
判定本地终端节点进行预处理及裁剪运算,或继续进行第一层或几层特征提取,处理后,数据上传边缘云进行下
一步计算.边缘云计算获得响应图后,返回响应图中极值序列,数据交由本地,通过信息融合策略进行响应图重
建.融合终端节点目标追踪算法处理结果后,最终判定目标位置.边缘云仅负责特征提取及响应图相关计算任
务,本地终端节点负责数据预处理、浅层特征提取以及获得极值序列后进行响应图后重建、尺度判定、参数计
算更新等计算任务.