
Page 66 - 《软件学报》2020年第9期
P. 66
张亮 等:扫地机器人增强位姿融合的 Cartographer 算法及系统实现 2687
与里程计数据的地图,图 6(d)是含有所有传感器数据的地图.从栅格地图显示的结果可以看出:图 6(c)(含有激光
雷达和里程计数据)的结果中建图质量最差,其余 3 图结果中无较大差异.
表 2 是在实验室场景对各种传感器组合的建图测试,因为对真实场景扫描不可能像数据集一样做到每次
一致,因而匹配分数是在进行 5 次测试后取 Mean 的中位值为代表.
Table 2 Matching scores of sensor combinations in the laboratory scene
表 2 实验室场景各传感器组合的匹配分数
Min Max Mean
激光雷达数据 0.651 0.836 0.714
激光雷达与 IMU 数据 0.650 0.788 0.704
激光雷达与里程计数据 0.650 0.790 0.685
激光雷达、IMU 与里程计数据 0.651 0.824 0.729
从表中可以得到:在含有 3 种传感器数据时建图质量是最高的,拥有最高的平均匹配分数,IMU 和里程计数
据对激光雷达数据起到了较好的辅助作用.只有激光数据时的建图质量高于有两种传感器的建图质量,其中,只
包含里程计数据作为辅助数据的建图质量是最低的.说明里程计数据对建图的干扰相比 IMU 数据稍大,在除激
光雷达外只有一种传感器的情况下,这种传感器数据因为误差较大,没有其余传感器进行辅助矫正,对建图起到
负面影响.因而在实际应用中,需要使用所有传感器数据才能得到最佳的建图质量.
3.2.2 长走廊场景测试与分析
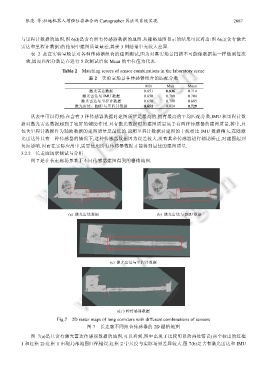
图 7 是在长走廊场景基于不同传感器建图得到的栅格地图.
(a) 激光雷达数据 (b) 激光雷达与 IMU 数据
(c) 激光雷达与里程计数据
(d) 3 种传感器数据
Fig.7 2D raster maps of long corridors with different combinations of sensors
图 7 长走廊不同组合传感器的 2D 栅格地图
图 7(a)是只含有激光雷达传感器数据的地图,可以看到,图中出现了比较明显的两处错误(两个标出的红框
1 和红框 2):红框 1 出现局部地图匹配错误,红框 2 中尺度与实际场景差异较大.图 7(b)是含有激光雷达和 IMU