
Page 64 - 《软件学报》2020年第9期
P. 64
张亮 等:扫地机器人增强位姿融合的 Cartographer 算法及系统实现 2685
地机器人平台,在环境复杂度以及尺度不同的实际场景使用不同组合的传感器,对 SLAM 系统进行评估测试.
3.1 基于标准数据集的测试与分析
PC 端测试平台使用的系统为 Ubuntu 16.04.4,其内核为 4.4.0-139-generic x86_64.
在测试中,基于 ROS kinetic 平台进行数据发送.
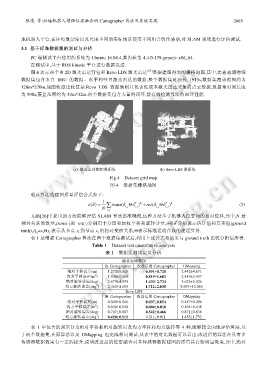
图 4 表示两个由 2D 激光雷达背包和 Revo LDS 激光雷达 [25] 数据建图得到的栅格地图,其中,德意志博物馆
数据集包含来自 IMU 的数据、水平和竖直激光雷达的数据,整个数据集时间长 1913s,数据集覆盖范围约为
128m*270m,地图轨迹比较复杂.Revo LDS 数据集则只包含低成本激光雷达采集的点云数据,数据集时间长度
为 990s,覆盖范围约为 33m*32m.两个数据集包含大量的闭环,能有效检测算法的回环性能.
(a) 德意志博物馆数据集 (b) Revo LDS 数据集
Fig.4 Dataset grid map
图 4 数据集栅格地图
验证算法的建图质量评估公式如下:
( ) =
εδ 1 (δ Θ ∑ trans , ij δ * , ij ) + 2 rot (δ Θ , ij δ * , ij ) 2 (3)
N , ij
文献[26]中提出的方法能够评估 SLAM 算法的准确度,这种方法基于机器人位姿间的相对位移,其中,N 是
*
相对关系的数量,trans(⋅)和 rot(⋅)分别用于分离和加权平移和旋转分量,δ和δ 分别表示估计值和真实值(ground
truth),δ i,j =x i Θx j 表示从节点 x i 到节点 x j 的相对变换关系,Θ表示标准运动合成的逆运算符.
表 1 是增强 Cartographer 算法在两个数据集测试后,利用上述公式将结果与 ground truth 比较分析后所得.
Table 1 Dataset test quantitative analysis
表 1 数据集测试定量分析
德意志博物馆
原 Cartographer 改进后的 Cartographer GMapping
绝对平移误差(m) 1.272±1.305 0.591±0.728 2.442±4.671
2
均方平移误差(m ) 1.330±2.065 0.819±1.602 2.419±2.457
绝对旋转误差(deg) 2.879±4.395 1.433±2.724 3.623±5.026
2
均方旋转误差(deg ) 2.362±4.605 1.712±2.038 8.991±12.065
Revo LDS
原 Cartographer 改进后的 Cartographer GMapping
绝对平移误差(m) 0.040±0.046 0.037±0.054 0.147±0.206
2
均方平移误差(m ) 0.039±0.029 0.004±0.018 0.164±0.438
绝对旋转误差(deg) 0.747±0.997 0.542±0.466 0.871±0.836
2
均方旋转误差(deg ) 0.420±0.512 0.511±0.911 1.455±1.753
表 1 中包含的误差分为绝对平移和绝对旋转以及均方平移和均方旋转等 4 种,能够较全面地评估算法.基
于两个数据集,在原算法以及 GMapping 也完成相同测试.从表中的对比数据可以看出:改进后的算法在具有多
传感器数据效果有一定的提升,说明改进后的位姿融合对多传感器数据建图的质量具有较明显效果,其中,绝对