
Page 15 - 《真空与低温》2025年第4期
P. 15
430 真空与低温 第 31 卷 第 4 期
下的位置斜装平开一个入孔。 应力的基本原理是用伽辽金法处理弹性体的控制
为减少系统能耗损失,考虑冷箱内部温区分布 方程,从而将几何域微分问题的解转化为积分问题,
[8]
的问题,避免相邻部件的温差过大,影响制冷效果, 本质上是加权残差法 。
尽量将温区相近的设备依次安置在相邻的位置。
在冷箱的一端安装支架,支架的一侧用固定件焊接 表 1 冷箱内低温部件几何参数表
在冷箱内导轨上,前两级换热器水平放置在支架上, Tab. 1 Geometric parameter of low-temperature
使用固定件将换热器和支架焊接在一起。液氮槽 components inside the cold box
和 80 K 吸附器通过拉杆垂直吊装在冷箱中,与前 部件 数量 使用温区/K 几何参数/mm
两级换热器相邻,20 K 吸附器和后两级换热器也 换热器 10 ≥20 最大长度 5 500、最大宽度 1 023
依次吊装在冷箱内。低温阀门以及氦透平膨胀机 4.5~20 最大长度 2 500、最大宽度 700
液氮槽 1 80 高度 1 600、直径 1 000
安装在冷箱顶部预留好的孔中。冷箱底部鞍座固
2 80 高度 1 500、直径 700
定在地面上,中间的鞍座跟冷箱固定,两端鞍座作 吸附器
1 20 高度 1 200、直径 500
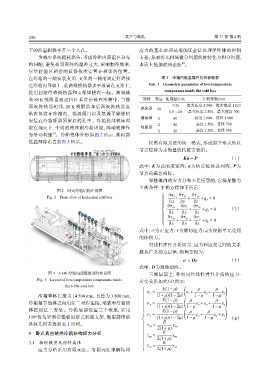
为滑动鞍座 。冷箱整体外形如图 2 所示,其内部
[7]
低温部件布置如图 3 所示。 按照有限元法的统一格式,形成如下形式的以
节点位移为未知量的代数方程组。
Ka = P (1)
式中: K为总刚度矩阵; a为结点位移总列阵; P为
节点荷载总列阵。
弹性体内的应力分布不是任意的,它满足静力
平衡条件,平衡方程如下所示:
图 2 卧式冷箱结构正视图
Fig. 2 Front view of horizontal cold box ∂σ x ∂τ yx ∂τ zx
+ + +q x = 0
∂x ∂y ∂z
∂τ xy ∂σ y ∂τ zy
(2)
+ + +q y = 0
∂x ∂y ∂z
∂τ xz ∂τ yz ∂σ z
+ + +q = 0
∂x ∂y ∂z
z
式中: σ为正应力; τ为剪切应力; q为控制单元受到
的体积力。
对线性弹性介质而言,应力和应变之间的关系
服从广义胡克定律,物理方程为:
σ = Dε (3)
式中: D为弹性矩阵。
图 3 6 kW 冷箱内部低温部件布置图 三维层面上,各向同性线性弹性介质的应力-
Fig. 3 Layout of low-temperature components inside
应变关系如式(4)所示:
the 6 kW cold box ( )
E(1−µ) µ µ
σ x = ε x + ε y + ε z
冷箱整体长度为 14 500 mm,直径为 3 800 mm, (1+µ)(1−2µ) 1−µ 1−µ
( )
E(1−µ) µ µ
冷箱每节筒体之间用法兰对焊连接,端盖和冷箱筒 ε x +ε y +
σ y =
ε z
(1+µ)(1−2µ) 1−µ 1−µ
体使用法兰安装。冷箱底部设置三个鞍座,采用 ( µ µ )
E(1−µ) ε x +
σ z =
120°包角轻型带垫板固定式鞍座支架,低温部件的 (1+µ)(1−2µ) 1−µ 1−µ ε y +ε z (4)
E
具体几何参数如表 1 所列。
τ xy =
γ xy
2(1+µ)
3 卧式真空绝热冷箱结构应力分析 E
τ yz = γ yz
2(1+µ)
3.1 物理模型及材料属性 E
τ zx = γ zx
应力分析采用有限元法。有限元法求解结构 2(1+µ)