
Page 109 - 《中国电力》2026年第5期
P. 109
石恒初等:基于录波数据的全域继电保护时钟失步智能校核系统设计 2026 年第 5 期
基于卡尔曼滤波算法的时钟同步校准,参数设置 文所提的“修正时钟偏差-漂移率”状态模型,获
如表 3 所示,选取主站时钟为参考时钟,基于本 取历史观测时钟偏差,执行卡尔曼滤波的预测-更
新过程,对应式(15)~(20)。通过上一监测时
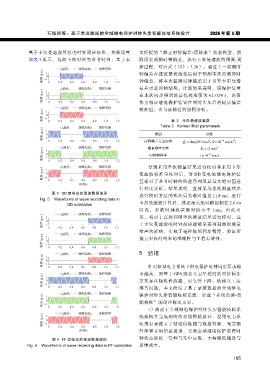
I a 波形; 故障起始; 故障清除
电流 (p.u.) −1 1 0 0 0.2 0.4 0.6 0.8 1.0 1.2 钟偏差在滤波器初始化后用于预测本次监测的时
钟偏差,将本次监测时钟偏差用于计算卡尔曼增
I b 波形; 故障起始; 故障清除 益并更新预测结果。计算结果表明,该保护装置
电流 (p.u.) −1 0 0 0.2 0.4 0.6 0.8 1.0 1.2 在本次同步得到的最优校准值为 62.024 s,该值
1
作为相应继电保护装置在时钟失步后的同步偏差
I c 波形; 故障起始; 故障清除 校准值,参与故障后的协同分析。
电流 (p.u.) −1 0 0 0.2 0.4 0.6 0.8 1.0 1.2 表 3 卡尔曼滤波参数
1
Table 3 Kalman filter parameters
U a 波形;
故障清除
故障起始;
电压 (p.u.) −1 0 0 0.2 0.4 0.6 0.8 1.0 1.2 过程噪声方差矩阵 Q i = diag((0.5 ms) ,(2×10 −4 ms/s) )
1
类别
参数
2
2
2
R i = (1 ms)
电压 (p.u.) −1 1 0 0 0.2 U b 波形; 故障起始; 0.8 故障清除 1.2 测量噪声方差 1×10 −3 ms/s
时钟漂移率
0.4
0.6
1.0
分别采用单次测量结果进行校时和采用卡尔
电压 (p.u.) −1 1 0 U c 波形; 故障起始; 故障清除 曼滤波校准量校时后,对 DD 变电站继电保护装
0.6
0 0.2 0.4 时间/s 0.8 1.0 1.2 置相对于参考时钟的残差序列及其最大绝对值进
行对比分析。结果表明,直接采用单次测量结果
图 5 DD 变电站的录波数据波形
进行校时方法的残差最大绝对值达 11.8 ms;进行
Fig. 5 Waveforms of wave recording data in
卡尔曼滤波计算后,残差最大绝对值控制在 2.6 ms
DD substation
以 内 , 多 数 时 刻 残 差 绝 对 值 小 于 1 ms。 由 此 可
I a 波形; 故障起始; 故障清除 见,相对于直接利用单次测量结果进行校时,基
电流 (p.u.) −1 1 0 于卡尔曼滤波的时钟校核能够显著抑制单次测量
1.2
0
1.0
0.8
0.6
0.2
0.4
噪声的影响,实现了毫秒级的同步精度,验证所
I b 波形; 故障起始; 故障清除
电流 (p.u.) −1 0 0 0.2 0.4 0.6 0.8 1.0 1.2 提方案校时结果的准确性与工程有效性。
1
I c 波形; 故障起始; 故障清除 5 结语
电流 (p.u.) −1 0 0 0.2 0.4 0.6 0.8 1.0 1.2 针对新型电力系统下继电保护时钟同步要求越
1
电压 (p.u.) −1 1 0 0 0.2 U a 波形; 故障起始; 0.8 故障清除 1.2 来越高,而基于 GPS 或北斗卫星授时的时钟同步
方案存在随机性故障、可靠性下降、依赖人工运
0.4
0.6
1.0
维等问题,本文研发了基于录波数据的全域继电
电压 (p.u.) −1 1 0 U b 波形; 故障起始; 故障清除 保护时钟失步智能校核系统,形成“在线监测-智
能校核”的闭环解决方案。
0.2
0.6
0.4
0.8
1.2
1.0
0
1)构建了全域继电保护时钟失步智能校核系
U c 波形;
故障清除
故障起始;
电压 (p.u.) −1 1 0 统架构并完成相应的功能模块设计,复用电力系
统现有录波主子站通信链路与数据资源,无需额
0.6
0 0.2 0.4 时间/s 0.8 1.0 1.2 外部署专用信息通道,实现全域继电保护装置时
图 6 FF 变电站的录波数据波形 钟状态的统一管理与集中运维,大幅降低建设与
Fig. 6 Waveforms of wave recording data in FF substation 运维成本。
105