
Page 307 - 《振动工程学报》2026年第5期
P. 307
第 5 期 胡 冰,等:舱门刚柔耦合动力学分析 1511
模态分析共产生 30 阶数据,其中 1~6 阶为刚性
模态,频率接近于 0,7~30 阶模态的频率逐步增大,
前 30 阶模态振动能量占比达 96.8%,满足动力学分
Z
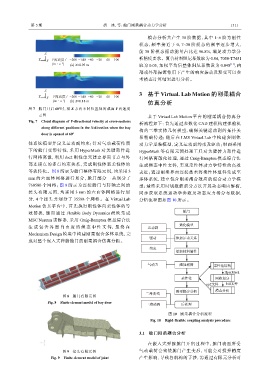
Y X Y向速度 / −200 −140 −80 −20 40 100 析精度要求。复合材料阻尼系数取为 0.04,7050-T7451
−1
(m·s ) (a) X=0.09 m 取为 0.05,加权平均后整体阻尼系数设为 0.048 [11] ,内
部或外部振源作用下产生的响应振动及形变可以参
考模态计算结果进行分析。
Z
Y X Y向速度 / −200 −140 −80 −20 40 100 3 基 于 Virtual. Lab Motion 的 刚 柔 耦 合
−1
(m·s ) (b) X=0.18 m
仿 真 分 析
图 7 舱门开启 60°时,沿 X 方向不同位置处的截面 Y 向速度
云图 基于 Virtual.Lab Motion 平台的刚柔耦合仿真分
Fig. 7 Cloud diagram of Y-directional velocity at cross-sections
析流程如下:首先通过参数化 CAD 建模构建弹舱机
along different positions in the X-direction when the bay
构的三维实体几何模型,确保关键运动副的拓扑关
door is opened at 60°
系精确传递;随后在 LMS Virtual.Lab 中构建多刚体
体系统模型并定义运动副约束;针对气动载荷作用 动力学基准模型,定义运动副约束及驱动;继而采用
下的舱门变形特性,采用 HyperMesh 对关键部件进 HyperMesh 等有限元预处理工具对关键传力部件进
行网格离散,利用 rbe2 刚性单元建立界面节点与外 行网格离散化处理,通过 Craig-Bampton 模态综合法
部连接点的多点约束关系,完成刚性体至柔性体的 生成模态中性文件,实现柔性体动力学特性的高效
等效转化。图 8 所示为舱门整体有限元图,均采用 3 表征;通过刚柔界面连接技术将柔性体组件集成至
mm 的六面体网格进行划分,舱门部分一共划分了 多体系统,建立包含刚柔耦合效应的混合动力学模
760580 个网格;图 9 所示为连接舱门与转轴之间的 型;最终采用时域数值积分方法开展动态响应解析,
接头有限元图,均采用 3 mm 的六面体网格进行划 同步获取系统运动学参数及动态应力场分布数据,
分,4 个接头共划分了 35588 个网格。在 Virtual.Lab 分析流程图如图 10 所示。
Motion 仿真平台中,首先执行刚性体向柔性体的等
效 替 换, 继 而 通 过 Flexible Body Dynamics 模 块 集 成 舱门
MSC Nastran 求解器,采用 Craig-Bampton 模态综合法
简化模型
生 成 包 含 界 面 自 由 度 的 模 态 中 性 文 件, 最 终 在 运动副
Mechanism Design 模块中构建刚柔混合多体系统,完
驱动 添加运动关系
成对整个嵌入式弹舱舱门的刚柔耦合仿真分析。
约束
添加材料属性
气动力 施加载荷 柔性化结构
HperMesh
柔性化 网格划分
op2文件 bdf文件
刚柔耦合分析 模态分析
二维曲线
图 8 舱门有限元图
Fig. 8 Finite element model of bay door
三维动画 后处理
图 10 刚柔耦合分析流程
Fig. 10 Rigid-flexible coupling analysis procedure
3.1 舱门刚柔耦合分析
在嵌入式弹舱舱门开启过程中,舱门表面所受
图 9 接头有限元图 气动载荷会致使舱门产生变形,可能会对投弹精度
Fig. 9 Finite element model of joint 产生影响,导致各机构的干涉,需通过有限元分析对