
Page 283 - 《振动工程学报》2026年第2期
P. 283
第 2 期 向 玲,等:基于多尺度残差动态域适应网络的不同工况下转子故障诊断方法 599
2 个卷积结构。这 2 个并行卷积结构分别包括 1 个 叉熵损失主要是用来判定实际输出与期望输出的接
3×3 的卷积核,以及 1 个由 3×1 和 1×3 串联而成的可 近程度。通过交叉熵损失函数获得分类损失,预测
分离卷积结构。3×1 和 1×3 的卷积核可以在保持计 标签和实际标签的交叉熵损失表达式为:
算量较小的情况下扩大感受野,有助于学习特定方 1 N ∑ C ∑[ ]
b s
s
loss clc = − Y ln(Y ) (9)
i
i
向上的特征,捕捉到更丰富的特征信息。3×3 的卷积 N
n=1 c=1
核可以捕捉到更大范围的空间关系。并行使用这 式中,C 为转子故障条件的数量;N 为样本的数量。
2 个结构,可以在局部区域内进行更细致的特征交 预测的标签 Y 由故障分类中的 Softmax 函数获得,其
b s
i
互,捕捉局部特征间的关联性,更好地捕捉到更丰富 表达式为:
和多样化的特征,提高网络对特征的感知能力和对 e w i
于数据的理解能力,提高故障诊断系统的性能。 b s N ∑ (10)
Y =
e
i w i
2.2 动态域适应 i=1
式中,w i 为模型全连接层对第 i 个样本的原始输出。
动态域适应阶段在全连接层对齐边缘分布与条 动态分布可由式(6)求得,记为 ¯ D f 。计算网络总损失
件分布。动态分布损失如式 (1) 所示,使用 MMD 经 Loss 为:
验计算域之间的分布散度。 Loss = loss clc +γ ¯ D f (11)
( )
边际分布可以计算为: 2
式中,γ 为超参数,定义为 γ = 0.3× −1 ,其
2 1+e −10m/M
D f (P s ,P t ) = ||E[f (Z s )]−E[f (Z t )]|| (4)
H k 中 m 为当前的训练周期数,M 是训练周期的总数。
式中,||·||为欧几里得范数,用于度量两个期望向量之
间的距离;下标 H k 表示在再生核希尔伯特空间 H k 中
两向量的距离。 3 诊 断 流 程
条件分布可以计算为:
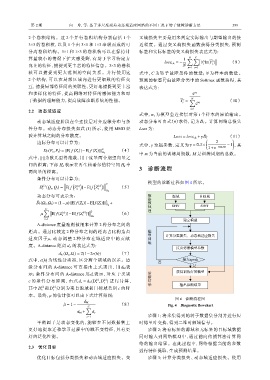
模型的诊断过程如图 所示。
( ) ( )
2 4
(c)
D (Q s ,Q t ) =
E[ f Z (c) ]−E[f Z (c)
(5)
f s t ]
H k
动态分布可表示为: 数 源域 目标域
据
2
¯ D f (Ω s ,Ω t ) = (1−µ)||E[f(Z s )]−E[ f(Z t )]|| + 预
H k SFFT SFFT
处
(c) 2
µ C ∑ E[f(Z )]−E[ f(Z )] (6) 理
(c)
t
s
H k
c=1 建立模型
A-distance 度量准则被用来计算 2 种分布之间的
距离。通过比较这 2 种分布之间的距离占比构造自 模
型 计算分类损失,动态域适应损失
适应因子µ,动态调整 2 种分布在域适应中的贡献 训
练
度。A-distance 距离 d A 的表达式为:
反向传播模型参数
d A (Ω t ,Ω t ) = 2(1−2e(h)) (7)
式中,e(h) 为线性分类器,区分两个领域的误差。边 最大epoch
否
缘 分 布 间的 A-distance 可 直 接 由 上 式 求 出 , 用 d M 表 是
示;条件分布间的 A-distance 用 d c 表示,对应于类别 诊 获得训练好的模型
断
(c)
c 的条件分布距离,由式 d c = d A (D s ,D ) 进行计算, 结
(c)
t
果 输出诊断结果
(c)
(c)
其中 D s 和 D 分别为来自源域和目标域类别 c 的样
t
本。最终,μ 的估计值可以由下式计算得到:
图 4 诊断流程图
d M
ˆ µ = 1− (8) Fig. 4 Diagnostic flowchart
C ∑
d M + d c
步骤 1:将采集得到的转子数据集分割并进行短
c=1
平衡因子是动态变化的,能够在不同数据集上 时傅里叶变换,得到二维时频域信号。
更好地提取迁移学习过程中的域不变特征,具有更 步骤 2:将有标签的源域和无标签的目标域数据
好的泛化性能。 同时输入到网络模型中,通过前向传播算法计算网
络的输出结果。在此过程中,网络根据当前的参数
2.3 优化目标
进行特征提取,生成预测结果。
优化目标包括分类损失和动态域适应损失。交 步骤 3:计算分类损失、动态域适应损失。使用