
Page 196 - 《振动工程学报》2026年第2期
P. 196
512 振 动 工 程 学 报 第 39 卷
负责运行主动隔振控制算法和数据存储,FPGA 主要 块实现控制输出,然后由驱动电路生成电流信号驱
负责对外接口、RS422 总线及 AD 数据采集功能等。 动音圈作动器运动,实现振动的主动隔离抑制。此
在隔振单元工作过程中,加速度传感器测量到 外,主动隔振单元与上级单元之间的实时通信通过
的 加 速 度 信 息 通 过 信 号 调 理 电 路 调 理 放 大, 经 过 FPGA 连接 RS422 总线实现,上级单元可通过 RS422
AD 电路采集后由 FPGA 发送给 DSP,DSP 软件对加 发送相关操作指令,控制过程中 DSP 存储的加速度
速度传感器信息解析,运行主动隔振控制算法,计算 和控制信号也可通过 RS422 回传至上级单元。隔振
并生成控制信号发送至 FPGA,FPGA 依据控制信号 单元中所采用 DSP 型号为 FT-C6701V-A,该型号在
要求生成相应的逻辑电平信号,发送给 DA 控制模 轨性能稳定。
上级主控 RS422
加速度传感器 信号调理电路 AD采集 程序存储/运行
FPGA DSP
音圈作动器 驱动电路 DA输出 数据存储
图 11 主控电路方案示意图
Fig. 11 Schematic diagram of control circuit scheme
增加柔性线缆,以模拟参考腔柔性连接线缆诱发的
4 超 静 主 动 隔 振 单 元 试 验
低频扰动影响。
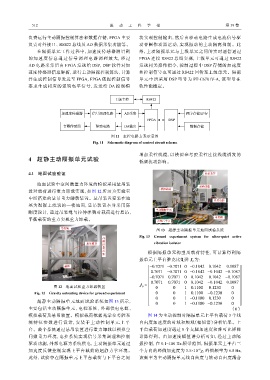
4.1 地面试验验证 悬吊装置
地面试验中空间微重力环境的模拟采用悬吊装
模拟载荷 柔性线缆
置对载荷进行重力卸载实现,如图 12 所示为实验室
中所搭建的悬吊重力卸载装置。悬吊装置安装在地
外接电源
基为混凝土浇筑的一楼地面,悬吊装置本身采用高 Z
Y X
主动隔振单元 o
刚度设计,通过吊装绳与拉伸弹簧对载荷进行悬吊,
电控箱
平衡载荷的重力实现重力卸载。 大理石平台
吊装绳
图 13 超静主动隔振单元地面试验系统
Fig. 13 Ground experiment system for ultra-quiet active
高
刚
悬吊弹簧 度 vibration isolator
悬
吊 根据隔振单元构型及载荷特性,可计算得到隔
架
振单元上平台雅克比矩阵 J p 为:
载荷 −0.7071 −0.7071 0 −0.1042 0.1042 0.1087
0.7071 −0.7071 0 −0.1042 −0.1042 −0.1087
−0.7071 0.7071 0 0.1042 0.1042
−0.1087
0.7071 0.7071 0 0.1042
−0.1042 0.1087
图 12 地面试验重力卸载装置 J p =
0 0 1 0.1100 0.1230 0
Fig. 12 Gravity unloading device for ground experiment 0 0 1 0.1100 −0.1230 0
0 0 1 −0.1100 0.1230 0
超静主动隔振单元地面试验系统如图 13 所示,
0 0 1 −0.1100 −0.1230 0
主要包括主动隔振单元、电控系统、外部供电电源、 (6)
模拟载荷及悬吊装置。模拟载荷依据光学参考腔系 图 14 为主动控制时隔振单元上平台载荷 3 个线
统 特 征 参 数 进 行 设 计, 安 装 于 主 动 控 制 单 元 上 平 自由度加速度的时域和频域(幅值谱)分析结果。上
台。整个系统通过悬吊装置进行重力卸载以模拟空 平台载荷加速度通过 8 个支腿加速度和雅可比矩阵
间微重力环境,电控系统实现信号采集调理和控制 计算得到。由加速度幅值谱分析可知,经过主动隔
驱动功能,外部电源为系统供电,主动隔振单元通过 振控制,在 0.1~100 Hz 频带范围,隔振单元上平台三
−6
加速度反馈控制实现上平台载荷的超静力学环境。 个方向的峰值加速度为 3.5×10 g,峰值频率为 6.8 Hz,
此外,试验中在隔振单元上平台载荷与下平台之间 该频率为主动隔振单元线自由度与转动自由度耦合