
Page 194 - 《振动工程学报》2026年第2期
P. 194
510 振 动 工 程 学 报 第 39 卷
0.05
器控制电压; ¨ x 0 为基座扰动加速度; ¨ x为隔振单元上
限幅PI控制
平台加速度;m 为支腿驱动上平台质量。 抗饱和PI控制
无限幅PI控制
加速度 / g 0
x
上平台m
k c F
x 0 −0.05
基 座 0 200 400 600 800 1000
时间 / s
图 4 单支腿等效动力学模型 (a) 上平台加速度
Fig. 4 Equivalent dynamic model of active struct (a) Acceleration of upper platform
80
支腿动力学模型,即控制电压到上平台加速度 限幅PI控制
60 抗饱和PI控制
的传递函数 G 1 为: 40 无限幅PI控制
k f s 2 20
G 1 (s) = (4)
mRs +k e k f s+kR 控制电压 / V 0
2
扰动传递模型,即基座扰动加速度到上平台加 −20
速度的传递函数 G 2 为: −40
k e k f s+kR −60
G 2 (s) = (5) 0 200 400 600 800 1000
mRs +k e k f s+kR
2
时间 / s
相 关 参 数 选 取 如 下: m = 7.5 kg R = 1.5 Ω k e = (b) 控制电压
,
,
,
1 V·s/m k f = 0.2 N/V k = 1700 N/m, 计 算 可 得 单 支 (b) Control voltage
,
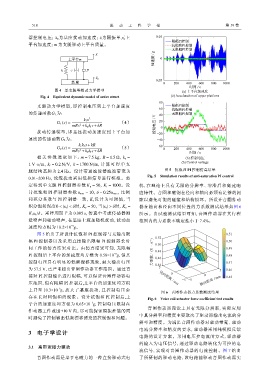
腿结构基频为 2.4 Hz。设计带通滤波器滤波带宽为 图 5 抗饱和 PI 控制仿真结果
0.01~200 Hz,线缆扰动采用低频信号进行模拟。整 Fig. 5 Simulation results of anti-saturation PI control
定得到单支腿 PI 控制器参数 K p = 50 K i = 1000。设 机,在理论上具有无限的分辨率、零滞后和高速响
,
计抗饱和 PI 控制器参数 u max = 10 δ = 0.25u max ,比例 应特性。音圈和磁钢在径向和轴向必须有足够的间
,
和积分系数与 PI 控制器一致, K c 设计为可调值,当 隙以避免可能的碰撞和结构损坏。所设计音圈作动
积分饱和深度 0 < |e u | < δ时, K c = 50,当 |e u | > δ时, K c = 器在轴向和径向不同位置的力系数测试结果如图 6
K i a f /δ。采样周期 T 为 0.005 s,仿真中考虑传感器测 所示。由试验测试结果可知,音圈作动器在其行程
量噪声和驱动噪声,在基座上施加随机扰动,扰动加 范围内的力系数不确定性小于 7.4%。
速度均方根为 10.2×10 g。
−3
图 5 给出了所设计抗饱和 PI 控制器与无输出限 0.51
幅 PI 控制器以及采用直接输出限幅 PI 控制器长时 0.50 0.50
间工作的仿真结果对比。由仿真结果可知,无限幅 0.48 0.49
PI 控制后上平台的加速度均方根为 0.58×10 g,但其 力系数 / (N·A −1 ) 0.52 0.48
−3
0.46
控制电压具有明显的低频漂移现象,最大输出电压 0.44 0.47
为 57.5 V,已严重超出音圈作动器工作范围。通过直 5 5 0.46
0
接对 PI 控制输出进行限幅,可以保证音圈作动器电 0 0.45
−5 −5 轴向距离 / mm
压范围,但有限幅 PI 控制后,上平台的加速度均方根
径向距离 / mm
−3
上升至 10.3×10 g,放大了基座扰动,且控制电压会
图 6 音圈作动器力系数测试结果
存在长时间饱和的现象。设计抗饱和 PI 控制后,上
Fig. 6 Voice coil actuator force coefficient test results
−3
平台的加速度均方根为 0.65×10 g,控制电压限制在
音圈作动器理论上具有无限分辨率,实际应用
作动器工作范围±10 V 内,尽可能保证隔振性能的同
中其分辨率和精度主要取决于驱动器输出电流的分
时避免了控制输出低频漂移诱发的控制饱和问题。
辨率和精度。为满足音圈作动器对驱动带宽、驱动
电流分辨率和精度的要求,驱动器采用纯模拟反馈
3 电 子 学 设 计
电路的设计方案。采用电压控电流的方式,驱动器
的输入为电压信号,通过驱动电路转化为可控的电
3.1 高带宽微力驱动
流信号,实现对音圈作动器的电流控制。图 7 给出
音圈作动器是基于电磁力的一种直接驱动式电 了所研制的驱动电路,该电路能驱动音圈作动器实