
Page 248 - 《振动工程学报》2025年第11期
P. 248
2706 振 动 工 程 学 报 第 38 卷
合,电压开始切换时,存储在初级绕组 L 0 中的能量 知,注能时间能够根据振动幅值的大小自适应调整,
通过变压器次级绕组 L 1 与 L 2 注入进压电元件,从而 并且通过该控制算法实现了对该仿真模型位移的稳
增大其开路电压,提升振动抑振效果。 定控制。
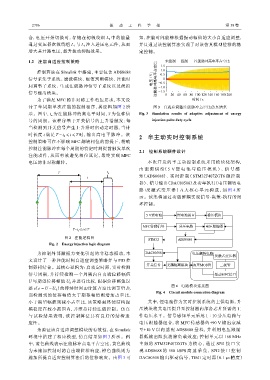
1.2 注能自适应控制策略 1.5 未控制 控制 注能脉冲高电平占空比
控制算法在 Simulink 中搭建,主要包含 ADS8688 1.0
0.5
信号采集子系统、滤波模块、极值判断模块、注能时 电压 / V; 注能脉冲高电平占空比 0
间调整子系统、生成注能脉冲信号子系统以及模拟 −0.5
−1.0
信号输出模块。 −1.5 0 20 40 60 80 100 120 140 160 180 200
为了满足 MFC 的非对称工作电压要求,本文设 时间 / s
计了单周期单次注能的控制程序,其逻辑如图 2 所 图 3 自适应调整注能脉冲占空比仿真结果
示。图中,t n 为注能脉冲的高电平时间,T 为位移信 Fig. 3 Simulation results of adaptive adjustment of energy
号的周期。该程序基于开关信号的上升沿触发:每 injection pulse duty cycle
当检测到开关信号产生上升沿时启动定时器,当计
时长度 t 满足 T −t n ⩽ t ⩽ T 时,输出高电平脉冲。该 2 半 主 动 实 时 控 制 系 统
控制策略可在不影响 MFC 翻转相位的前提下,精确
控制注能脉冲在每个周期的特定时刻提前触发单次
2.1 控制系统硬件设计
注能动作,从而有效避免相位延迟,最终实现 MFC
电压的非对称翻转。 本次开发的半主动控制系统采用模块化架构,
由 能 源 供 给( 5 V 锂 电 池 与 稳 压 模 块 ) 、 信 号 感
T t n
知( ADS8688) 、 实 时 控 制 ( STM32F407ZGT6 微 控 制
t
器)、信号输出(DAC80508)及功率执行(电压翻转电
路+反 激 式 变 压 器 ) 五 大 核 心 单 元 构 成 , 如 图 4 所
示。该架构通过功能解耦实现信号-决策-执行的闭
环控制。
5 V锂电池 锂电池接口 稳压模块
MFC传感信号 分压电路 电压跟随器
T−t n ≤t≤T
图 2 注能逻辑图
STM32 ADS8688
Fig. 2 Energy injection logic diagram
为抑制外部激振力变化引起的非稳态振动,本 DAC80508 电压翻转电路
反激式变压器
文设计了一种注能时间自适应调整策略并与 PID 控
开关信号 光耦隔离模块 高压MOS管 二极管
制器相结合。其核心逻辑为:启动定时器,实时检测
信号周期,并持续检测一个周期内自由端位移幅值 驱动MFC接口
U 与期望位移幅值 U d 并进行比较,根据位移幅值误
图 4 电路模块连接图
差 e( e = U −U d )的持续时间 ∆t计算占空比调节量 D,
Fig. 4 Circuit module connection diagram
当检测到的位移幅值大于期望幅值则增加占空比,
小于期望幅值则减小占空比,该策略最终使结构振 其中,锂电池作为实时控制系统的主供电源,升
幅稳定在较小范围内,并维持持续注能控制。仿真 压模块将其电压提升至控制器内部各芯片所需的工
与 试 验 结 果 表 明, 该 控 制 算 法 具 有 良 好 的 结 构 适 作电压水平。信号感知单元采用 1∶10 分压电路与
应性。 电压跟随器组合,将 MFC 传感器约±90 V 输出衰减
为验证该自适应调整模块的有效性,在 Simulink 至±10 V 以内适配 ADS8688 量程,并利用电压跟随
环境中搭建了相应模型,仿真结果如图 3 所示。图 器低输出阻抗消除负载效应;控制单元以 168 MHz
中,蓝色曲线表示注能脉冲高电平占空比,黄色曲线 主 频的 STM32F407ZGT6 为 核 心 , 通 过 SPI1 接 口 实
为未施加控制时的自由端位移响应,橙色曲线则为 现 ADS8688 的 500 kSPS 高 速 采 集 , SPI2 接 口 控 制
施加所提自适应控制算法后的位移响应。由图 3 可 DAC80508 输出驱动信号,TIM1 定时器(0.1 μs 精度)