
Page 251 - 《振动工程学报》2025年第11期
P. 251
第 11 期 何军峰,等:面向大型结构振动抑制的小型轻质低功耗压电半主动实时控制系统 2709
(1)阻尼比提升:控制前阻尼比为 0.01871,控制
3 试 验 结 果 分 析 及 讨 论 后阻尼比为 0.03572,提升约 1.91 倍。阻尼比提升源
于 SSDEI 技术的高效机电能量转换。当压电元件开
3.1 大展弦比无人机机翼受控结构 路电压增大时,其产生的反向阻尼力距同步增强,从
而加速振动能量耗散;
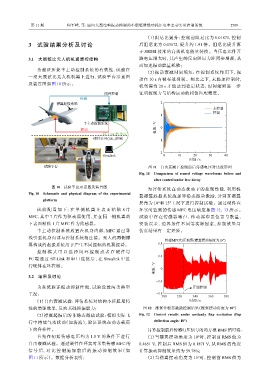
为验证所提半主动控制系统的有效性,试验在
(2)振动衰减时间缩短:在控制系统作用下,振
一架大展弦比无人机机翼上进行,试验平台示意图
动在 10 s 内被有效抑制。相比之下,未施加控制时,
及装置图如图 10 所示。 机翼需约 20 s 才能达到稳定状态,时间缩短进一步
闭环控制 证明控制力与结构运动的相位匹配精度。
传感
襟翼起振系统 2
未控制
控制
1
半主动控制系统
驱动 电压 / V 0
ST-Link 和 串口
硬件在环(HIL)控制 −1
−2
Simulink 0 10 20 30 40
时间 / s
试验平台 图 11 自由衰减下控制前后传感电压对比波形图
Fig. 11 Comparison of sensed voltage waveforms before and
after control under free decay
图 10 试验平台示意图及装置图
为评估系统在动态扰动下的控制性能,利用机
Fig. 10 Schematic and physical diagram of the experimental
翼襟翼起振系统施加非稳态振动激励,分别在襟翼
platform
摆角为 10°和 15°工况下进行控制试验。通过硬件在
试 验 配 置 如 下: 在 单 侧 机 翼 上 表 面 粘 贴 8 片 环实时监测的传感 MFC 电压响应如图 12、13 所示。
MFC,其中 7 片作为驱动器使用,并在同一侧机翼的 试验中存在传感器噪声、作动器布置位置与数量、
下表面粘贴 1 片 MFC 作为传感器。 安装误差、边界条件不同等实际因素,控制效果与
半主动控制系统放置在机身内部,MFC 通过导 仿真结果有一定差距。
线引至机身内部与控制系统相连接。无人机两侧襟 传感MFC电压波形(襟翼摆动角度为10°)
翼构成的起振系统用于产生不同振幅的机翼振动。 0.8
控 制 模 式 可 以 选 择 闭 环 控 制 或 者 在 硬 件与
0.4
PC 端 通 过 ST-Link 和 串 口 连 接 后 , 在 Simulink 中 进
电压 / V 0
行硬件在环控制。
3.2 结果及讨论
−0.4
为系统验证振动抑制性能,试验设置两类典型 开始控制
工况: −0.8
300 320 340 360 380
(1)自由衰减试验:评估系统对结构本征阻尼特 时间 / s
性的增强效果,反映基础抑振能力; 图 12 襟翼非稳态激励控制结果(襟翼摆动角度为 10°)
(2)襟翼起振后的非稳态激励试验:模拟实际飞 Fig. 12 Control results under unsteady flap excitation (flap
行中持续气动扰动(如湍流),验证系统在动态载荷 deflection angle: 10°)
下的鲁棒性。 计算控制前后传感电压信号的均方根 RMS 值可得:
首先在初始传感电压约为 1.5 V 的条件下进行 (1)当襟翼摆动角度为 10°时,控制前 RMS 值为
自由衰减试验。通过硬件在环实时采集传感 MFC 的 0.4651 V,控制后 RMS 值为 0.1871 V,从 RMS 的角度
信 号 后, 对 比 控 制 施 加 前 后 的 振 动 抑 制 效 果 ( 如 计算振动抑制效果约为 59.78%;
图 11 所示)。数据分析表明: (2)当襟翼摆动角度为 15°时,控制前 RMS 值为