
Page 87 - 《软件学报》2026年第1期
P. 87
84 软件学报 2026 年第 37 卷第 1 期
表 9 现有面向多模态数据处理应用的测试用例生成方法总结 (续)
应用 发表 文献 方法 测试用例生成
领域 年份 来源 类型
自动 事故报告 使用大语言模型从文本车祸报告中提取道路层、环境层和动态对象层的关键信息, 再结
驾驶 2024 [128] 合地图信息针对交互行为完成交通参与者的路径规划
采用物理感知的多模态对象插入策略, 从对象数据库选取 3D 对象实例, 经姿态估计确
多传感器 2024 [129] 蜕变测试 定插入位置和方向, 利用虚拟传感器模拟多传感器数据并处理遮挡, 生成真实且模态一
融合感知 致的测试数据, 运用基于适应度引导的蜕变测试方法, 设计适应度指标评估测试数据揭
示错误的能力, 借助蜕变关系自动检测感知系统的错误
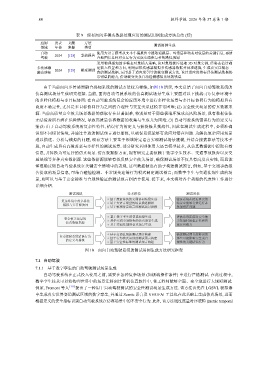
由于当前面向多传感器融合感知系统的测试方法较为稀缺, 如图 10 所示, 本文总结了面向自动驾驶系统的
仿真测试场景生成研究框架. 当前, 面向自动驾驶系统的仿真测试场景生成主要面对以下挑战: (1) 复杂环境中
的多样化模拟与多目标协同: 在自动驾驶系统复杂的应用环境中进行多样化场景与多目标协同行为的模拟具有
高度不确定性, 尤其是多目标协同行为之间的合理性与交互关系建模非常困难; (2) 安全攸关场景的仿真数据来
源: 当前高质量安全攸关场景数据的获取存在显著困难, 特别是对于那些极端环境或高风险场景, 现有数据往往
无法覆盖所有潜在危险情况, 导致高质量仿真数据的收集与生成尤为困难; (3) 自动驾驶系统错误行为的定义与
捕获: 由于自动驾驶系统的复杂性特性, 错误行为的定义与捕捉极具挑战性, 因此在测试生成过程中, 必须准确
识别不同错误情境, 并通过合适的测试预言进行捕捉, 以确保系统能够有效应对潜在问题. 为解决复杂应用场景
难以描述、分析与模拟的问题, 现有方法主要基于领域特定语言实现测试场景建模, 并结合搜索算法等技术手
段, 自动生成具有高覆盖率与多样性的测试场景. 部分研究者则使用大语言模型技术, 从仿真数据源中提取有效
信息, 并转换为可运行的仿真场景. 仿真数据源方面, 现有研究主要依赖于数字孪生技术、交通事故报告以及交
通法规等多种真实数据源. 这些数据源能够有效反映安全攸关场景, 确保测试场景不仅具有高度真实性, 而且能
够准确反馈自动驾驶系统在关键安全情境中的表现. 这些数据源也有助于构建测试预言, 例如, 基于交通事故报
告提取的场景信息, 可结合碰撞检测、非常规变速等行为模式制定测试预言; 而数字孪生与交通法规生成的场
景, 则可以与基于安全标准与合规性验证的测试预言相结合使用. 接下来, 本文将对各个类型的代表性工作进行
详细介绍.
测试挑战 技术路径 测试目标
基于搜索算法的交通协同场景生成 验证系统在接近真实的
复杂环境中的多样化 基于大语言模型的场景描述解析 场景中能够有效运行并
模拟与多目标协同
基于领域特定语言的测试场景建模 发现潜在问题
基于数字孪生的仿真场景生成 评估系统在应对安全攸
安全攸关场景的 基于交通事故报告的仿真场景生成 关情境时的稳定性和应
仿真数据来源
基于交通法规的仿真场景生成 急反应能力
基于交通法规的测试预言构建 确保测试预言能够识别
自动驾驶系统错误行为 基于行为模式识别的测试预言构建 那些可能影响安全或合
的定义与捕获
基于安全性标准的测试预言构建 规性的关键错误行为
图 10 面向自动驾驶系统的测试用例生成方法研究框架
7.1 自动驾驶
7.1.1 基于数字孪生的自动驾驶测试场景生成
自动驾驶系统在正式投入使用之前, 需要在各种复杂场景 (如极端操作条件) 中进行严格测试. 在此过程中,
数字孪生技术可以将物理世界中的场景迁移到计算机仿真软件中, 使工程师能够全面、安全地进行大规模测试.
例如, Fremont 等人 [111] 提出了一种用于自动驾驶测试的安全性测试场景生成方法. 该方法首先在 LGSVL 模拟器
中生成真实世界赛道测试区域的数字孪生, 并通过 Scenic 语言及 VERIFAI 工具包在此基础上生成仿真场景, 进而
根据定义的安全指标识别自动驾驶系统在仿真场景中的不安全行为. 此外, 该方法通过度量时序逻辑 (metric temporal