
Page 83 - 《软件学报》2026年第1期
P. 83
80 软件学报 2026 年第 37 卷第 1 期
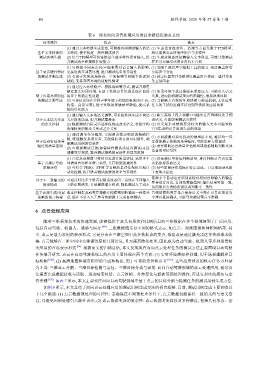
表 6 现有面向语音处理应用的技术路径优缺点总结
技术路径 优点 缺点
(1) 通过文本转换生成语音, 可精准控制测试输入的语 (1) 生成语音在音色、语调等方面受限于TTS模型,
基于文本转换的 义特征, 便于构建一致性测试预言 难以覆盖真实环境中的声学多样性
测试音频生成 (2) 结合TTS模型可快速批量生成多样性语音输入, 提 (2) 生成效果高度依赖输入文本质量, 可能导致测试
升测试效率和规模扩展能力 样本分布偏窄或语音内容不自然
(1) 可模拟不同麦克风/声源布置对语音输入的影响, (1) 受限于现有声学模拟工具的能力, 无法覆盖所有
基于录音硬件特征 更接近真实部署环境, 提升测试结果的实用性 实际声学变化
的测试音频生成 (2) 有助于发现远场拾音、空间混响等问题下的识别 (2) 固定位置变异策略难以覆盖用户移动、遮挡等复
缺陷, 支持部署环境的适配性验证 杂互动因素
(1) 通过注入环境噪声、模拟混响等方式, 测试音频更
贴近真实应用环境, 有助于发现语音识别系统在自然 (1) 如果环境干扰过强或未受控注入, 可能引入语义
基于应用环境特征 场景下的稳定性问题 失真, 进而影响测试预言的准确性, 增加误报风险
的测试音频生成 (2) 可评估系统在多种声学环境下的性能表现(如车内、(2) 当前缺乏有效的环境建模与验证机制, 无法证明
街道、会议室等), 便于发现场景敏感型缺陷, 提高系 注入的干扰特征确实符合期望模拟的应用场景
统的泛化能力
(1) 通过输入文本的语义调整, 可系统性地生成不同语 (1) 缺乏高效手段去判断TTS输出是否准确传达了预
基于文本语义变异 义层级的语音, 提升测试覆盖率 设语义, 可能影响测试可靠性
的语义控制 (2) 根据测试目标灵活选择保持或改变语义, 有助于构 (2) 语义复杂或结构变化较大的输入文本可能导致
造细粒度的蜕变关系或差分关系 TTS生成的语音出现失真的现象
(1) 通过调节变异幅度, 实现语音扰动强度的精确控 (1) 不同被测对象对扰动的敏感度不同, 难以统一界
制, 既能触发系统异常, 又能保持语音的可识别性, 确
基于语音特征变异 保测试用例的有效性 定最能揭示缺陷的变异幅度, 可能需要大量调试
幅度的质量控制 (2) 需要借助语音质量评估模型或指标辅助判断变异
(2) 可根据测试目的(如鲁棒性测试或边界测试)灵活 语音的可接受性
调整变异强度, 提升测试策略的灵活性和适用范围
(1) 直接从音频信号特征出发进行质量评估, 适用于不 (1) 仅依赖信号特征判断质量, 难以判断语音内容是
基于音频信号的 同语音内容和多语言场景, 具有较强的通用性 否仍保持原始语义
质量评估 (2) 可结合 PESQ、STOI 等音频质量评估指标实现自 (2) 某些质量评估指标在特定语速、口音或说话风格
动化检测, 提升语音测试流程的效率与客观性 下表现不稳定
依赖多个自动语音识别系统对相同音频输入的输出
基于不一致输出的 可通过对比多个语音识别系统或同一系统在不同输入 差异进行对比, 若训练数据趋同, 输出结果可能一致,
错误捕获 下的识别结果, 自动捕获潜在错误, 降低测试人工成本
从而难以有效捕获错误或判断不一致性
基于音频生成/变异 通过控制生成或变异策略并构建预期的输出一致性关 音频层面的变异是否保持语义不变在语音识别任务
策略的预言构建 系, 能在不引入人工参考的前提下完成自动测试 中难以直接确认, 可能导致测试预言不准确
6 点云处理应用
随着三维采集技术的快速发展, 能够提供丰富几何形状和比例信息的三维数据在多个领域得到了广泛应用,
包括自动驾驶、机器人、遥感与医疗 [98] . 三维数据通常以不同的格式表示, 如点云、深度图像和体积网格等. 其
中, 点云是最为常用的表示形式, 它是分布在三维空间中众多数据点的集合, 数据点是通过激光雷达等传感器来收
集. 点云能够在三维空间中完整保留原始几何信息, 且无需离散化处理, 因此成为自动驾驶、机器人等多种场景相
关应用的首选表示形式 [99] . 根据前文的归纳总结, 本文发现现有面向点云处理任务的测试方法主要围绕自动驾驶
任务展开研究. 点云在自动驾驶系统上的应用主要体现在两个方面: (1) 实时环境感知和处理, 用于场景理解和目
标检测 [100] ; (2) 高清地图和城市模型的生成和构建, 用于可靠的定位和参考 [101] . 这些应用涉及的核心任务可归纳
为 3 类: 三维点云分割、三维目标检测与定位、三维目标分类与识别. 面向自动驾驶领域的点云处理应用, 通常首
先需要完成数据接收与读取、运动畸变补偿、点云组帧、外参变化与滤波等预处理操作, 再进行后续的感知与定
位步骤 [102] . 如表 7 所示, 本文主要关注面向自动驾驶领域中基于点云的目标分割与检测任务的测试用例生成方法.
如图 9 所示, 本文总结了面向点云处理应用的测试用例生成方法的研究框架. 目前, 测试用例生成主要面临以
下几个挑战: (1) 点云数据预处理的可控性: 需确保在不同预处理条件下, 点云数据仍能保持一致的几何与语义信
息, 以避免因预处理引入额外误差; (2) 点云数据变异的复杂性: 点云数据的变异涉及多种维度, 包括几何形态、密