
Page 91 - 《软件学报》2026年第1期
P. 91
88 软件学报 2026 年第 37 卷第 1 期
目前, 面向该类系统的测试用例生成仍然面临诸多挑战: (1) 跨模态一致性的问题: 与单传感器感知系统不同,
多传感器融合感知系统需合成跨不同传感器的模态一致测试用例. 例如, 同一物体在图像和相应点云中的姿态应
保持一致. 然而, 现有的基于图像和点云的测试方法简单组合无法保证这种一致性. (2) 语义真实性的问题: 在变异
种子测试用例时, 若没有适当的物理约束, 极大概率会出现不合理的情况. 比如, 插入的物体可能出现在无效位置,
或者导致错误的视角关系, 如被遮挡但仍可见的建筑物. 这些不真实的测试用例无法有效检测感知系统在实际场
景中的性能.
为解决上述挑战, Gao 等人 [129] 提出了 MultiTest, 一种基于适应度引导的蜕变测试方法, 专门用于多传感器融
合感知系统的测试. MultiTest 包含 3 个主要步骤: 姿态估计、物理感知多传感器模拟和适应度引导测试. 在测试
开始时, 给定一个多模态测试种子 (即一对图像帧和点云帧), MultiTest 会自动从数据库中选择一个 3D 目标实例,
然后将其插入到原始数据中. 为了生成语义合理的测试数据, MultiTest 首先会搜索插入目标的有效姿态, 再使用
物理感知传感器模拟模块合成逼真的图像和点云帧. 这一过程包含激光雷达模拟、相机模拟和遮挡处理. 在激光
雷达模拟中, MultiTest 模拟激光束发射并考虑噪声影响; 在相机模拟中, 利用 Blender 开源软件构建虚拟相机, 并
2
借助 S CRNet 模型优化插入对象的颜色, 使其与场景融合自然. 同时, MultiTest 还处理了插入对象与背景数据之
间的遮挡问题, 确保数据的真实性. MultiTest 定义了蜕变关系来创建测试预言, 判断对象插入前后系统预测结果
是否满足特定条件, 从而自动检测感知结果中的错误, 避免了繁琐的手动标注. 此外, 为了提升测试效率, MultiTest
设计了一种适应度引导的测试过程. 通过计算包含对象漏检、误检和定位错误等因素的适应度指标, 优先保留具
有高错误揭示能力的测试用例, 使得生成的测试集能够更有效地检测系统错误. 实验结果表明, MultiTest 方法能
有效检测被测系统的错误行为, 并通过再训练提高系统的鲁棒性.
7.3 现有方法优缺点分析
经过调研分析, 本文发现面向多模态数据处理应用的测试用例生成方法已在学术界和工业界引起广泛关注, 尤
其是在自动驾驶等典型场景中, 不同模态传感器数据的融合带来了更高的感知能力和系统鲁棒性. 但由于传感器之
间的数据形式差异大、语义融合复杂、测试任务多样, 现有方法在场景生成与测试预言构建方面仍面临诸多挑战:
(1) 测试场景语义信息提取的准确性和一致性不足: 当前研究多依赖图像、点云、文本等模态进行融合建模, 但由
于各类模态中语义提取技术仍存在局限, 导致融合生成的测试场景在关键要素识别、行为重建等方面存在信息缺
失或语义冲突, 影响最终测试效果; (2) 方法的适配性与可复用性不足: 多模态测试往往依赖特定平台、工具或仿真
环境, 许多方法缺乏跨平台部署能力, 通用性有限, 难以支撑规模化、系统化的测试实践. 为更全面地理解当前面向
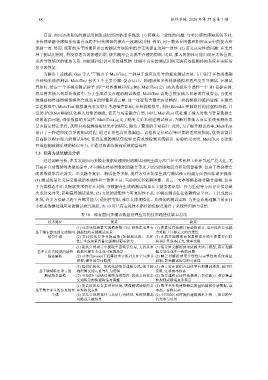
多模态数据处理应用的测试研究现状, 表 10 对已有主流技术路径的优缺点进行了系统性归纳与总结.
表 10 现有面向多模态数据处理应用的技术路径优缺点总结
技术路径 优点 缺点
(1) 可系统性探索大规模参数空间, 高效生成具有 (1) 搜索过程依赖目标函数设计, 适应性和泛化能
基于搜索算法的交通协同 挑战性的关键测试场景 力受限于目标定义的合理性
场景生成 (2) 支持优化多种目标函数 (如碰撞风险、多样 (2) 在真实地图或高保真模拟环境中搜索存在时
性), 生成场景具备更强测试覆盖能力 间和计算成本压力, 效率受限
(1) 能从自然语言中提取丰富场景信息, 支持从事 (1) 场景语义解析结果依赖大语言模型, 存在理解
基于大语言模型的场景 故报告等文本生成可复现场景 偏差与生成不一致的问题
描述解析 (2) 可结合prompt工程等技术实现语义补全与细节 (2) 缺乏对解析结果合理性与完整性的系统验证
推理, 提升场景还原度 机制, 影响测试场景的可靠性
(1) 提供结构化、形式化的场景建模方式, 便于精 (1) 语言设计需结合具体平台和测试需求, 通用性
基于领域特定语言的 确控制交通元素与行为逻辑 受限, 迁移成本较高
测试场景建模 (2) 可复用已有语法规则与模型库, 高效支持复杂 (2) 场景建模灵活性依赖语言表达能力, 难以覆盖
交通场景的快速构造与调整 非规则或极端复杂场景
(1) 能高度还原真实世界环境, 增强测试场景的真 (1) 数字孪生构建依赖高质量地图和传感数据, 成
基于数字孪生的仿真场景 实性和代表性 本高、流程复杂
生成 (2) 可结合地图拓扑与场景行为特征, 系统挖掘高 (2) 不同地区或环境的建模规范不统一, 难以跨平
风险或关键场景 台共享与复用